 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Учебное пособие: Электрические аппараты
ж) Цифровые реле времени. В цифровом реле времени управляющее устройство запускает генератор. Импульсы от генератора подаются на вход не-синхронизируемого двоичного счетчика. В момент совпадения кода времени с заданной уставкой сигнал дешифратора скачкообразно меняется и выходной импульс подается на усилители.
После каждого цикла счетчик переводится в нуль. Приведенная погрешность описанных реле времени не превышает 5 %. Коммутационная износостойкость составляет не менее 4*106 циклов.
Лекция №16
Тема лекции:
Бесконтактные контакторы и пускатели на базе тиристорных элементов.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Бесконтактные коммутирующие и
регулирующие полупроводниковые устройства переменного тока (БКРПУ)
Бесконтактные коммутирующие и
регулирующие полупроводниковые устройства переменного тока (БКРПУ)
а) Общие сведения. На основе тиристоров возможно осуществление следующих операций:
1) включение и отключение электрической цепи с активной и смешанной (индуктивной и емкостной) нагрузкой;
2) изменение тока нагрузки за счет регулирования момента подачи сигнала управления.
Наиболее широкое применение в бесконтактных электрических аппаратах получили фазовое и широтно-импульс-ное управление (рис. 16.1).
В первом
случае среднее и действующее значения тока меняются зa счет изменения момента подачи на тиристор открывающего
сигнала — за счет угла ![]() . Угол
. Угол ![]() называ
называ![]()
![]()
![]()
![]()
![]()
![]() ется углом управления. Действующее напряжение на
нагрузке при двухполупериодной схеме и встречно-параллельном включении двух
тиристоров (рис. 16.2)
ется углом управления. Действующее напряжение на
нагрузке при двухполупериодной схеме и встречно-параллельном включении двух
тиристоров (рис. 16.2)
где Uт — амплитуда напряжения питания; Uc, Uно — действующее и среднее значения напряжения питания; у — угол регулирования.
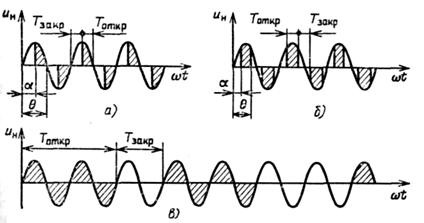
Рис. 16.1. Напряжение на нагрузке при фазовом (а), фазовом с принудительной коммутацией (б) и широтно-импульсном (в) управлении
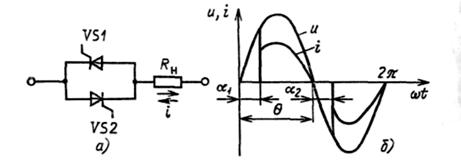
Рис. 16.2. Встречно-параллельное включение тиристоров (а) и форма тока при активной нагрузке (б)
Кривая тока в сети и в нагрузке не синусоидальна, что вызывает искажение формы напряжения сети и нарушения в работе потребителей, чувствительных к высокочастотным помехам. Для уменьшения этих искажений необходимы специальные меры.
При широтно-импульсном управлении (рис. 12.46, в) в течение времени Тоткр на тиристоры подан открывающий сигнал, они открыты и к нагрузке приложено напряжение UH. В течение времени Тзакр управляющий сигнал снят и тиристоры закрыты. Действующее значение тока в нагрузке
![]()
где ![]() — ток нагрузки при Тзакр=0.
— ток нагрузки при Тзакр=0.
Регулирование
тока нагрузки возможно за счет изменения как угла ![]() ,
так и угла
,
так и угла ![]() . Принудительная
коммутация (
. Принудительная
коммутация (![]() <18О°) осуществляется с
помощью специальных узлов или специальных тиристоров, которые могут запираться
подачей сигнала управления. При больших токах из-за сложности такие схемы не
применяются. Создание транзисторов на большие токи (сотни ампер) и большие
напряжения (сотни вольт) позволяет упростить принудительную коммутацию цепей
постоянного и переменного тока, что особенно важно в аппаратах повышенного
быстродействия.
<18О°) осуществляется с
помощью специальных узлов или специальных тиристоров, которые могут запираться
подачей сигнала управления. При больших токах из-за сложности такие схемы не
применяются. Создание транзисторов на большие токи (сотни ампер) и большие
напряжения (сотни вольт) позволяет упростить принудительную коммутацию цепей
постоянного и переменного тока, что особенно важно в аппаратах повышенного
быстродействия.
На основе тиристоров работают следующие бесконтактные электрические аппараты:
1) тиристорные пускатели для прямого пуска асинхронных двигателей;
2) тиристорные пускатели для плавного пуска, реверса и останова асинхронных двигателей большой мощности (до 5000 кВт);
3) регуляторы мощности и напряжения;
4) автоматические выключатели переменного тока высокого и низкого напряжения повышенного быстродействия;
5) регулирующие аппараты для управления двигателями электрического транспорта переменного тока с рекуперацией энергии при торможении.
Для тиристорных аппаратов, как правило, необходима защита от токов перегрузки и КЗ, а также от недопустимого повышения температуры корпусов тиристоров. Защита от КЗ в данном случае осуществляется с помощью быстродействующих токоограничивающих предохранителей или автоматических выключателей.
Ниже приводятся основные технические данные тиристорных пускателей и регуляторов, выпускаемых отечественной промышленностью.
Пускатели тиристорные серии ПТ. В фазах А и В пускателя (рис. 16.3) установлены трансформаторы тока ТА1 и ТА2, обеспечивающие работу устройства токовой зашиты. Защита тиристоров от перегрузки осуществляется терморезистором Rt. Поскольку пускатель предназначен для реверса двигателя, то в фазах А и В установлены дополнительные комплекты встречно включенных тиристоров. При нажатии кнопки «Пуск вперед» включается реле KI, которое подает напряжение на управляющие электроды тиристоров, участвующих в пуске «Вперед». При нажатии кнопки «Пуск назад» включается реле КЗ и подастся напряжение на управляющие электроды тиристоров, участвующих в пуске «Назад». Питание блока защиты и реле К1 и КЗ осуществляется выпрямителем, питающимся от фаз В и С.
Основные
параметры пускателя: Uном — 380 В; Iном—40 А; Iпуск = 360 А при tпуск =0,4с; электрическая износостойкость
![]() циклов; ресурс работы не
менее 10 000 ч.
циклов; ресурс работы не
менее 10 000 ч.
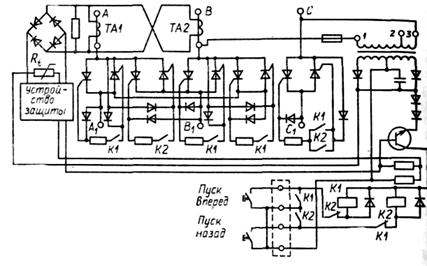
Рис. 16.3. Тиристорный пускатель типа ПТ
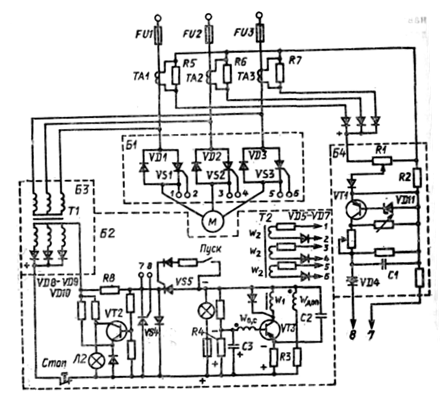
Тиристорный пускатель
На рис. 16.4 показан один из вариантов схемы бесконтактного — тиристорного пускателя. Силовой блок Б1 содержит силовые тиристоры VS1—VS3 и диоды VD1—VD3, рассчитанные на номинальный и пусковой токи двигателя М. При подаче сигнала управления на электроды /—2, 3—4, 5—6 тиристоры открываются и двигатель подключается к сети. В отрицательный полупериод, когда тиристоры закрываются отрицательным анодным напряжением, ток двигателя проходит по диодам VD1—VD3. Диоды могут быть заменены тиристорами.
При снятии сигнала управления (при перегрузке, потере фазы, нажатии кнопки «Стоп») тиристоры закрываются. Следующий полупериод тока пропускается диодами. После этого диоды VD1, VD2, VD3 закрываются и двигатель отключается от сети. По тиристорам и диодам протекает лишь небольшой ток утечки.
Сигналы
управления тиристорами формируются в блокинг-генераторе Б2, который
получает напряжение от блока питания БЗ. При нажатии кнопки «Пуск»
включается тиристор VS5 и все
напряжение прикладывается к резистору R3. При этом транзистор VT3 закрыт, так как напряжение на резисторе R3 больше, чем на резисторе R4. По мере заряда конденсатора С2 наступают
условия для открытия транзистора VT3 и
конденсатор С2 начинает разряжаться на обмотку ![]() , трансформатора Т2. Электродвижущая
сила, наводящаяся при этом на обмотке
, трансформатора Т2. Электродвижущая
сила, наводящаяся при этом на обмотке![]() способствует
быстрому и полному открытию транзистора VT3. При разряде конденсатора напряжение на резисторе R3 возрастает, транзистор VT3 закрывается и снова начинается заряд конденсатора С2.
Таким образом, генерируются импульсы тока в обмотке
способствует
быстрому и полному открытию транзистора VT3. При разряде конденсатора напряжение на резисторе R3 возрастает, транзистор VT3 закрывается и снова начинается заряд конденсатора С2.
Таким образом, генерируются импульсы тока в обмотке ![]() и в трех выходных
обмотках
и в трех выходных
обмотках ![]() появляются
управляющие импульсы. Диоды VD5—VD7 пропускают импульсы только положительной
полярности.
появляются
управляющие импульсы. Диоды VD5—VD7 пропускают импульсы только положительной
полярности.
Длительность импульса 30 мкс при паузе между импульсами 300 мкс (частота около 3 кГц).
Аналогичные схемы могут управляться сигналами постоянного тока или переменным током низкой частоты. Использование блокинг-генератора дает возможность быстро включать тиристор и уменьшить нагрузку по его управляющему электроду.
При нормальном режиме транзистор VT2 блока Б2 насыщен и лампа Л2 не горит. Если на контакты 7, 8 блока Б2 подано напряжение с одноименных контактов блока защиты Б4, тиристор VS4 открывается и блокинг-генератор лишается питания. Блок питания БЗ включается только на резистор R8. При потере питания генерация в блоке Б2 прекращается и тиристор VS5 отключается. Одновременно транзистор VT2 закрывается и загорается лампа Л2, сигнализируя об отключении пускателя от защиты. В случае потери фазы в выходном напряжении (после диодов VD8—VDW) появляется пауза. В эту паузу блок Б2 оста навливается и тиристор VS5 отключается, что ведет к закрытию силовых тиристоров.
Блок Б4 защиты двигателя и силовых тиристоров от перегрузки питается от трансформаторов тока ТА1—ТАЗ. Напряжение с нагрузочных резисторов выпрямляется и подается на потенциометр R1. Параметры трансформаторов ТА1—ТАЗ и резисторов Rl, R5—R7 выбираются так что при номинальном токе во всех трех фазах напряжение, снимаемое с потенциометра R1, меньше напряжения пробоя стабилитрона VD11. До тех пор пока напряжение на стабилитроне меньше напряжения пробоя (1/<УПроб), сопротивление стабилитрона очень высоко. При этом ток базы транзистора VT1 недостаточен для его открытия. Если ток хотя бы в одной фазе превысит номинальное значение, то возникает неравенство U>U'проб, сопротивление стабилитрона резко падает, ток в базе VT1 возрастает и он насыщается. Ток в стабилитроне ограничивается резистором R2 до допустимого значения. Если восстановится неравенство U<UnJme, то сопротивление стабилитрона снова возрастет, транзистор VT1 закроется. После открытия транзистора VT1 начинается заряд конденсатора С1. Напряжение с конденсатора С1 на выход 7, 8 не подается до тех пор, пока не превысит напряжение переключения динистора VD4. Динистор имеет такую же вольт-амперную характеристику, как и тиристор при /у=0. Если перегрузка была настолько кратковременной, что конденсатор С2 не успел зарядиться, то напряжение на выходе 7, 5 не появится и пускатель останется в работе. Если Uc\ станет больше напряжения переключения динистора VD4, произойдет разряд конденсатора С1 на цепь управления тиристора VS4 блока Б2 и последний откроется. При этом прекратится генерация импульсов, открывающих VS1—VS3, и двигатель остановится. Параметр срабатывания блока защиты регулируется потенциометром R1. За счет усложнения блока защиты можно создать выдержку времени в зависимости от условия перегрузки. Защита двигателя и силовых тиристоров от токов КЗ в данном пускателе осуществляется быстродействующими предохранителями Fill—FU3 типа ПНБ-5.
\
Рис. 16.4. Тиристорный пускатель
По сравнению с контактными тиристорный пускатель обладает следующими преимуществами:
1. Отсутствие электрической дуги при коммутациях делает аппарат незаменимым при работе во взрывоопасных и пожароопасных средах.
2. Высокая электрическая износостойкость (15-10е циклов).
3. Совершенная защита от токов перегрузки и КЗ, а также при потере фазы, что обеспечивает увеличение срока службы двигателей.
4. Допустимое число включений достигает 2000 в час.
5. Длительность отключения не превышает 0,02 с.
6. Высокая надежность и долговечность, а также отсутствие необходимости в уходе при эксплуатации.
Недостатками тиристорного пускателя являются сложность схемы, большие габариты и высокая стоимость. Несмотря на эти недостатки, бесконтактные пускатели находят широкое применение во взрыво- и пожароопасных производствах и других областях техники, требующих высокой надежности.
Лекция №17
Тема лекции:
Электромагнитные муфты. Фрикционные, индукционные. Принцип действия, конструкция
Общие сведения
Для регулирования частоты вращения, вращающего момента на валу, для соединения и разъединения ведущего и ведомого валов применяются электрические аппараты в виде муфт с электрическим управлением. Эти муфты можно подразделить на индукционные и электромагнитные.
Индукционные муфты (рис. 17.1) по принципу действия аналогичны асинхронному двигателю с короткозамкнутым ротором. Приводной двигатель соединяется со сплошным якорем 1, ведомый вал связан с индуктором 2. Катушка возбуждения 4 создает постоянный магнитный поток 5, замыкающийся по якорю 1. При вращении якоря магнитное поле катушки индуктора пересекает цилиндрическое тело якоря, и в нем наводятся вихревые токи. Взаимодействие этих токов с магнитным полем создает силу, которая увлекает индуктор в направлении вращения якоря. Материал якоря должен обладать малым удельным электрическим сопротивлением, что обеспечивает возникновение достаточно больших вихревых токов, и высокой магнитной проницаемостью для получения возможно больших значений магнитного потока.
Регулируя ток возбуждения Iв и тем самым меняя магнитное поле, можно плавно регулировать в широких пределах частоту вращения и передаваемый вращающий момент ведомого вала.
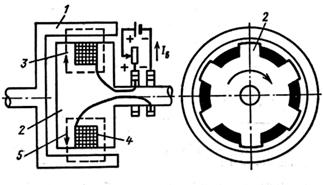
Рис. 17.1. Индукционная муфта:
7 — якорь; 2 — индуктор; 3 — магнитная система; 4 — катушка возбуждения; 5—магнитный поток
На рис. 14.2 показаны механические характеристики индукционной муфты. На этом рисунке Iв*= Iв/Iв.ном — ток возбуждения в относительных единицах; М* =М/Мном — передаваемый момент в относительных единицах, где Мном — номинальный момент муфты; Iв.ном — соответствующий ему номинальный ток возбуждения; п — частота вращения в процентах частоты вращения при отсутствии на ведомом валу нагрузки.
При увеличении момента нагрузки угловая скорость ведомого вала уменьшается. При этом возрастают скольжение и токи, наводимые в якоре муфты. Увеличение токов в якоре увеличивает момент, развиваемый муфтой и передаваемый на ведомый вал.
Механические характеристики индукционной муфты существенно зависят от нагрузки. Поэтому для стабилизации скорости применяются специальные регулирующие устройства.
Более широко применяются электромагнитные муфты, в которых используется электромагнитное усилие притяжения между ферромагнитными телами. Эти муфты удобны в эксплуатации, имеют малые габаритные размеры и небольшое время срабатывания, передают большие мощности на валу при сравнительно малой мощности управления. Ниже рассматриваются фрикционные, ферропорошковые и гистерезисные электромагнитные муфты.
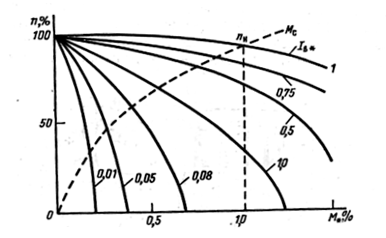
Рис. 17.2. Механические характеристики индукционной муфты при различном токе возбуждения
Электромагнитные фрикционные муфты
а) Принцип действия. Простейшая конструкция электромагнитной фрикционной муфты представлена на рис. 14.3. Постоянное напряжение подводится к щеткам, скользящим по контактным кольцам 1, соединенным с выводами обмотки 2. Обмотка имеет цилиндрическую форму и окружена магнитопроводом ведущей части 3 муфты. Направляющая втулка 7 имеет выступ 6, который входит в паз 8 полумуфты 5, которая может перемещаться вдоль оси, оставаясь соединенной с валом 10.
В обесточенном состоянии пружина 9 упирается в направляющую втулку 7, жестко закрепленную на валу 10, и отодвигает подвижную часть полумуфты 5 вправо. При этом поверхности трения (диски 4) не соприкасаются и ведомый вал 10 разобщен с ведущим валом П.
При подаче на обмотку управляющего напряжения возникает магнитный поток Ф. На полумуфты 3, 5, выполненные из магнитомягкого материала, начинает действовать электромагнитная сила, притягивающая их друг к другу. Таким образом полумуфты и обмотка представляют собой электромагнит. Между дисками 4, жестко связанными с деталями 3 и 5, возникает сила нажатия, обеспечивающая необходимую силу трения и их надежное сцепление.
На рис. 14.3,6 изображена поверхность трения. Элементарный момент трения
dMтр = kтрpyд2nR2dR, (17.1)
где pyд — давление на поверхности трения, Па; kTP — коэффициент трения; R — текущий радиус поверхности трения, м.
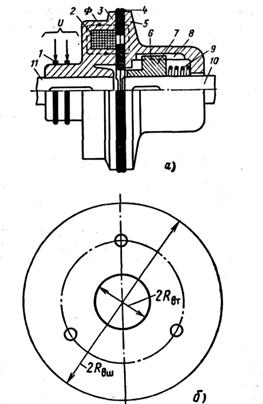
Рис.17.3.Электромагнитная фрикционная муфта:
а–разрез муфты;
б–поверхность трения
Коэффициенты трения для дисков из различных материалов приведены в табл. 17.1.
Коэффициенты трения Таблица 17.1.
| Материал | Режим покоя | Режимдвижения |
| Сталь — сталь | 0,15 |
0,15 |
| Сталь — чугун | 0,3 | 0,18 |
| Сталь — бронза | 0,15 |
0,15 |
| Чугун — чугун | 0,15 |
0,15 |
|
Металлокерамический материал на медной основе — сталь |
0,3—0,4 |
— |
|
Металлокерамический материал на желез- ной основе — сталь |
0,4—0,8 |
— |
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |