 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Проектирование управляемого привода в электромеханических системах
При помощи правил преобразования структурной
схемы, перенесем звено ![]() через первый сумматор,
при этом необходимо включить звено
через первый сумматор,
при этом необходимо включить звено ![]() в
обратную связь. Поскольку
в
обратную связь. Поскольку ![]() , преобразовав,
таким образом, схему, мы получим единичную отрицательную обратную связь. Аналогично
перенесем второй сумматор через два звена:
, преобразовав,
таким образом, схему, мы получим единичную отрицательную обратную связь. Аналогично
перенесем второй сумматор через два звена: ![]() и
и
![]() , добавив эти звенья в
локальную обратную связь.
, добавив эти звенья в
локальную обратную связь.
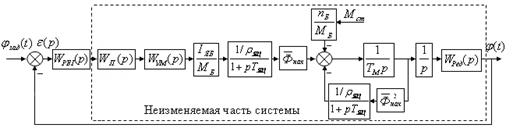
Рис. 2.5. Преобразованная структурная схема привода
Запишем передаточную функцию неизменяемой части системы:
![]() , (2.19)
, (2.19)
где ![]() –
коэффициент исходной системы без учета регулятора.
–
коэффициент исходной системы без учета регулятора.
Выражение 2.19 при минимальной и максимальной нагрузках примет следующий вид:
![]() , (2.20)
, (2.20)
![]() . (2.21)
. (2.21)
Проанализируем устойчивость исходной системы и соответствие системы требованиям по качеству. Об устойчивости системы можно судить по ее реакции на единично ступенчатую функцию, т.е. по ее переходной характеристике. Построим соответствующие графики в программном пакете MATLAB. Графики переходной характеристики представлены на рис. 2.6 – 2.7.
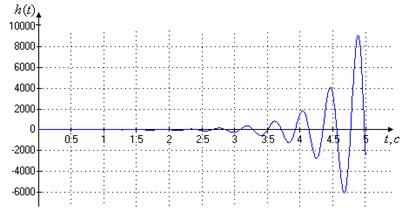
Рис. 2.6. Переходная характеристика исходной системы при минимальной нагрузке на управляемый привод
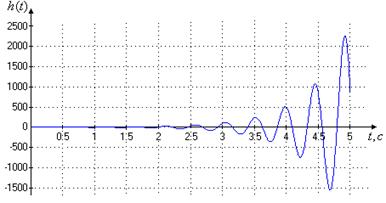
Рис. 2.7. Переходная характеристика исходной системы при максимальной нагрузке на управляемый привод
Таким образом, мы получили, что исходная система не устойчива. Необходимо введение в исходную систему корректирующего устройства (КУ) для обеспечения требуемого качества как в установившемся (задано в виде динамической ошибки), так и в переходном (ограничения на прямые показатели качества) режимах.
Проведем синтез при помощи метода логарифмических амплитудно-частотных характеристик (ЛАЧХ). Разобьем синтез на условные стадии:
1) Построение ЛАЧХ исходной системы.
2) Построение желаемой ЛАЧХ в соответствие с требованиями ТЗ.
3) Определение передаточной функции КУ.
1) Для построения логарифмических амплитудно-частотных характеристик (ЛАЧХ) неизменяемой части системы проведем расчеты.
![]() .
. 
Осуществим переход: ![]() .
Тогда выражение для построения ЛАЧХ примет вид:
.
Тогда выражение для построения ЛАЧХ примет вид:
![]() .
.
![]() .
.
![]() .
.
2)
В ТЗ заданы относительная динамическая
ошибка, максимальные скорость и ускорение траектории движения. В соответствие с
этим для построения границы запретной области необходимо найти координаты
контрольной точки ![]() .
.
![]() . (2.22)
. (2.22)
![]() . (2.23)
. (2.23)
В соответствие с (2.22–2.23) найдем ![]() .
.
![]() ,
, ![]() ,
, ![]() .
.
Таким образом, ![]() .
.
Для
того чтобы входное воздействие воспроизводилось с ошибкой, не превосходящей
динамическую ошибку, ЛАЧХ системы не должна попадать в запретную область. По рис. 2.8 можно сделать вывод о
выполнении требования ТЗ по качеству системы в установившемся режиме, т.к. при
минимальном и максимальном значениях электромеханической постоянной двигателя ![]() ЛАЧХ располагаемой
разомкнутой системы не заходит в запретную область. Однако система не
удовлетворяет требуемому качеству в переходном режиме
ЛАЧХ располагаемой
разомкнутой системы не заходит в запретную область. Однако система не
удовлетворяет требуемому качеству в переходном режиме ![]() .
.
Среднечастотный участок определяет устойчивость и запасы устойчивости системы, а, следовательно, и качество системы в переходном режиме. Для построения среднечастотного участка будем использовать методику Бесекерского [3, с. 369].
Для определения левой и правой границ среднечастотного участка используются неравенства:
![]() , (2.24)
, (2.24)
где  –
базовая частота,
–
базовая частота,
![]() – показатель колебательности.
– показатель колебательности.
Значение ![]() определим
по номограмме [3, c.378]:
определим
по номограмме [3, c.378]: ![]() .
.
Подставим значения в формулу 2.24:
В формулу подставляем значение показателя
колебательности: ![]() .
.
Таким образом, ![]() ,
,
![]() .
.
 , (2.25)
, (2.25)
где  .
.
Сначала рассчитаем значение ![]() и сравним его с
постоянными времени исходной системы.
и сравним его с
постоянными времени исходной системы.
Для вычисления ![]() необходимо
вычесть из
необходимо
вычесть из ![]() постоянные времени
исходной системы, меньшие чем
постоянные времени
исходной системы, меньшие чем ![]() .
.
Исходные данные:
![]()
По правилу сначала нужно вычесть наименьшие
постоянные времени, поэтому отнимем от ![]() только
только
![]() исходной системы:
исходной системы:
Найдем значение ![]() из
формулы 2.25:
из
формулы 2.25:
![]()
![]()
![]()
![]()
Таким образом, мы рассчитали значения границ среднечастотного участка:
![]() ,
, ![]()
![]()
![]()
Расширяя среднечастотный участок, мы добьемся требуемого качества
в переходном режиме. Левую границу будем смещать до тех пор, пока не будет
выполняться требуемое значение запаса по модулю ![]() ,
которое необходимо выбрать по заданному значению перерегулирования по
номограмме [3, с. 358]:
,
которое необходимо выбрать по заданному значению перерегулирования по
номограмме [3, с. 358]: ![]() .
Правая граница должна обеспечить запас как минимум
.
Правая граница должна обеспечить запас как минимум ![]() .
.
Высокочастотный участок определяет
помехозащищенность системы, поэтому наклон высокочастотных асимптот должен быть
большим. В то же время с целью упрощения модели корректирующего устройства
высокочастотные асимптоты ![]() выполняют
параллельными высокочастотным асимптотам исходной характеристики, то есть на
частоте
выполняют
параллельными высокочастотным асимптотам исходной характеристики, то есть на
частоте ![]() наклон становится 80 –
дБ/дек.
наклон становится 80 –
дБ/дек.
3) Определим передаточную функцию регулятора. Построение
![]() представлено на рис. 2.8.
представлено на рис. 2.8.
Определим передаточную функцию последовательного КУ:
![]() . (2.26)
. (2.26)
Составим передаточную функцию ![]() по виду
по виду![]() :
:
![]() ,
,
![]() .
.
По формуле 2.26 найдем ![]() :
:
![]() .
.
2.4 Обеспечение требуемой точности проектируемого привода
В ТЗ на проектирование указаны допустимые
статическая ![]() и динамическая
и динамическая ![]() ошибки
привода.
ошибки
привода.
Статическая ошибка системы оценивается в
типовом режиме: при постоянных значениях задающего и возмущающего воздействий.
В п. 2.1 уже использовалась допустимая ![]() при
выборе элементов измерителя рассогласований. На измеритель рассогласования была
выделена третья часть
при
выборе элементов измерителя рассогласований. На измеритель рассогласования была
выделена третья часть ![]() . Оставшиеся две
трети
. Оставшиеся две
трети ![]() составляют: статическая
ошибка элементов прямого канала системы (усилителя, двигателя, редуктора),
ошибки системы по задающему и возмущающему воздействиям. В соответствии с
вышесказанным, уравнение статической ошибки системы:
составляют: статическая
ошибка элементов прямого канала системы (усилителя, двигателя, редуктора),
ошибки системы по задающему и возмущающему воздействиям. В соответствии с
вышесказанным, уравнение статической ошибки системы:
![]() , (2.27)
, (2.27)
где ![]() –
ошибка элементов прямого канала,
–
ошибка элементов прямого канала,
![]() – ошибка по задающему воздействию,
– ошибка по задающему воздействию,
![]() – ошибка по возмущению.
– ошибка по возмущению.
Таким образом, статическая погрешность элементов прямого канала ![]() .
.
Статическая погрешность по задающему значению ![]() , так как система является
астатической по задающему воздействию.
, так как система является
астатической по задающему воздействию.
Статическая погрешность привода по возмущающему воздействию ![]() –
– ![]() .
.
Определим допустимую статическую погрешность привода по возмущающему воздействию:
![]() .
.
Для определения ошибки скорректированной системы по возмущающему воздействию воспользуемся методом коэффициентов ошибок, описываемым формулой [3, с. 198]:
![]() , (2.28)
, (2.28)
где ![]() – передаточная
функция замкнутой системы по ошибке относительно возмущения
– передаточная
функция замкнутой системы по ошибке относительно возмущения ![]() ,
,
![]() – статический
момент нагрузки приведенного к валу двигателя, являющийся возмущающим
воздействием (
– статический
момент нагрузки приведенного к валу двигателя, являющийся возмущающим
воздействием (![]() ).
).
Найдем передаточную функцию ![]() по
структурной схеме (рис. 2.5) скорректированной системы управляемого привода.
по
структурной схеме (рис. 2.5) скорректированной системы управляемого привода.
 .
.
![]() .
.
 .
.
![]() .
.
Таким образом, получили, что ![]() ,
значит, рассчитанный коэффициент передачи корректирующего устройства
удовлетворяет требованиям к статической точности системы.
,
значит, рассчитанный коэффициент передачи корректирующего устройства
удовлетворяет требованиям к статической точности системы.
Далее проведем оценку динамической точности системы. Допустимая динамическая ошибка системы ![]() указывает заданную
точность воспроизведения программного входного сигнала.
указывает заданную
точность воспроизведения программного входного сигнала.
Амплитуда ошибки определяется по формуле:
![]() , (2.29)
, (2.29)
где ![]() –
ордината контрольной точки запретной области, найденная в пункте 2.3.
–
ордината контрольной точки запретной области, найденная в пункте 2.3.
Найдем значение динамической ошибки при минимальной и максимальной нагрузках на управляемый привод:
![]() ,
,
![]() .
.
Таким образом, рассчитанная динамическая ошибка системы ![]() меньше, чем динамическая ошибка системы,
заданная в ТЗ
меньше, чем динамическая ошибка системы,
заданная в ТЗ ![]() . Значит, скорректированная система
удовлетворяет требованиям ТЗ по динамической точности при максимальной массе
нагрузки.
. Значит, скорректированная система
удовлетворяет требованиям ТЗ по динамической точности при максимальной массе
нагрузки.
3. Моделирование спроектированного управляемого привода
3.1 Модель скорректированной системы при отработке ступенчатого сигнала
3.1.1 Цифровая модель скорректированной системы при отработке ступенчатого сигнала при минимальной нагрузке на управляемый привод
На рис. 3.1 приведена цифровая модель скорректированной системы при отработке ступенчатого сигнала при минимальной нагрузке на управляемый привод, разработанная в программном пакете MATLAB версии 7.3.
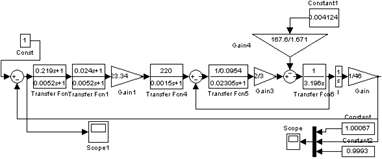
Рис. 3.1. Цифровая модель скорректированной системы при отработке ступенчатого сигнала при минимальной нагрузке на управляемый привод

Рис. 3.2. Реакция выхода системы на единичный ступенчатый сигнал при минимальной нагрузке
По графику (рис. 3.2) найдем установившееся и
максимальное значения ![]() :
:
![]()
Расчетное выражение для перерегулирования:
![]() . (3.1)
. (3.1)
Для определения время регулирования ![]() построим «коридор»:
построим «коридор»:
![]() . (3.2)
. (3.2)
Определим прямые показатели качества желаемой системы при минимальной массе нагрузки на проектируемый привод и сравним с соответствующими значениями, заданными в ТЗ:
Требования ТЗ:
![]() ,
,
![]() .
.
Реальные значения показателей определим по формулам 3.1 – 3.2:
![]() ,
,
![]() .
.
Границы коридора: ![]() ,
,
![]()
Статическую ошибку системы можно определить по графику ошибки, представленном на рис. 3.3.
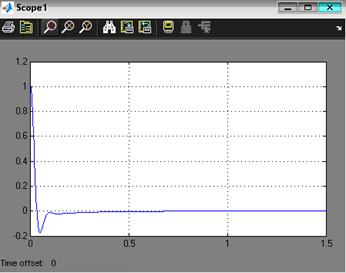
Рис. 3.3. Ошибка системы при отработке ступенчатого сигнала при минимальной массе нагрузки на управляемый привод
В ТЗ определена статическая допустимая погрешность:
![]() .
.
![]() . (3.3)
. (3.3)
Реальное значение ошибки: ![]() .
.
3.1.2 Цифровая модель скорректированной системы при отработке ступенчатого сигнала при максимальной нагрузке на управляемый привод
Цифровая модель скорректированной системы при отработке ступенчатого сигнала при максимальной массе нагрузки на управляемый привод представлена на рис. 3.4.
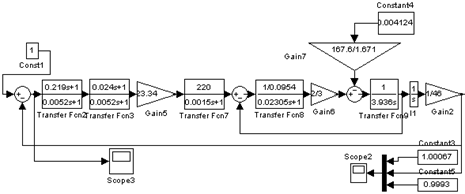
Рис. 3.4. Цифровая модель скорректированной системы при отработке ступенчатого сигнала при максимальной нагрузке на управляемый привод
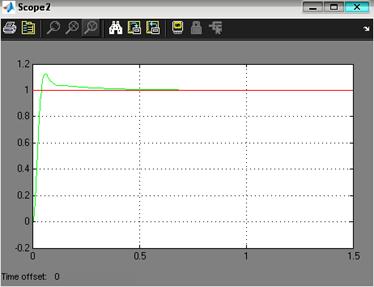
Рис. 3.5. Реакция выхода системы на единичный ступенчатый сигнал при максимальной нагрузке
По графику (рис. 3.5) найдем установившееся и
максимальное значения ![]() :
:
![]()
Реальные значения показателей:
![]() ,
,
![]() .
.
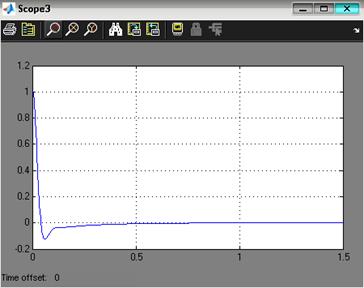
Рис. 3.6. Ошибка системы при отработке ступенчатого сигнала при максимальной массе нагрузки на управляемый привод
Результаты моделирования приведены в приложении 5.
Реальное значение ошибки: ![]() .
.
Требование ТЗ к статической точности: ![]() .
.
Проанализировав найденные показатели качества скорректированной системы, можно сделать, что полученная скорректированная система удовлетворяет заданным требованиям к качеству переходного процесса и статической точности, как при минимальной, так и при максимальной массе нагрузки на управляемый привод.
3.2 Модель желаемой системы при отработке выбранной траектории
3.2.1 Цифровая модель скорректированной системы при отработке выбранной траектории движения при минимальной нагрузке на управляемый привод
На рис. 3.7 представлена цифровая модель скорректированной системы при отработке выбранной траектории движения при минимальной массе нагрузки, построенная в программной среде MATLAB.

Рис. 3.7. Цифровая модель скорректированной системы при отработке программной траектории при минимальной нагрузке на управляемый привод
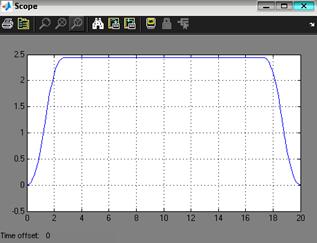
Рис. 3.8. Реакция выхода системы при отработке программной траектории движения при минимальной массе нагрузки на управляемый привод
Динамическую ошибку системы определим по графику ошибки, представленном на рисунке 3.9.

Рис. 3.9. Ошибка системы при отработке программной траектории движения при минимальной массе нагрузки на управляемый привод
![]()
Реальное значение ошибки: ![]()
Требование ТЗ к динамической точности: ![]() .
.
3.2.2 Цифровая модель скорректированной системы при отработке программной траектории движения при максимальной массе нагрузки на управляемый привод
На рис. 3.10 представлена цифровая модель скорректированной системы при отработке выбранной траектории движения при максимальной массе нагрузки, построенная в программном пакете MATLAB.
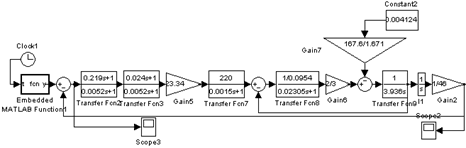
Рис. 3.10. Цифровая модель скорректированной системы при отработке программной траектории при максимальной нагрузке на управляемый привод
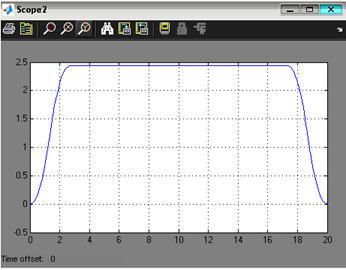
Рис. 3.11. Реакция выхода системы при отработке программной траектории движения при минимальной массе нагрузки на управляемый привод
Динамическую ошибку системы определим по графику ошибки, представленном на рисунке 3.12.
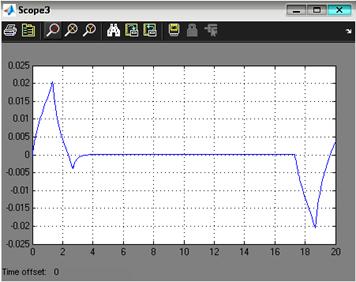
Рис. 3.12. Ошибка системы при отработке программной траектории движения при минимальной массе нагрузки на управляемый привод
![]()
Реальное значение ошибки: ![]()
Требование ТЗ к динамической точности: ![]() .
.
Цифровая модель спроектированного электропривода для максимальной и минимальной массы нагрузки удовлетворяет ограничению на динамическую ошибку, представленному в ТЗ.
Заключение
В курсовом проекте был разработан электропривод, предназначенный для программного управления линейным перемещением механизма подъёма промышленного робота-манипулятора.
При выполнении первого этапа проекта рассматривались две программные траектории перемещения нагрузки, предложенные в техническом задании, для которых были рассчитаны параметры (скорость, ускорение). Для каждой из траекторий были определены нагрузки, действующие на привод, выбран двигатель и редуктор, проведена проверка двигателя и редуктора на нагрев. Далее ввиду функциональных особенностей привода была выбрана оптимальная траектория.
На втором этапе проектирования выбраны информационные элементы (потенциометры) по заданной статической точности, проведен синтез регулятора.
На следующем этапе был проведено моделирование цифровой модели спроектированного электропривода с помощью программного пакета MATLAB. Полученная цифровая модель отвечала всем требованиям технического задания по точности и качеству. Соответствие характеристик рассчитанной системы требованиям технического задания приведено в таблице 4.
Таблица 4. Сравнение результатов, полученных при выполнении проекта
| Основные требования | По требованиям ТЗ | Скорректированная система | |
|
|
|
|
14.81 |
|
|
11.04 | ||
|
|
|
|
0.87 |
|
|
0.95 | ||
|
|
|
|
0.001 |
|
|
0.001 | ||
|
|
|
|
0.78 |
|
|
0.83 | ||
Спроектированный электропривод удовлетворяет всем требованиям ТЗ как при минимальной, так и при максимальной массах нагрузки.
Список литературы
1. Подлинева Т.К., Устюгов М.Н. Проектирование управляемого привода в электромеханических системах: Учебное пособие по курсовому проектированию.
2. http://www.izh-reduktor.ruproductionscherv_reductsreduktoryi _odnostupenchatyie _tipa_5ch.html.
3. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. – СПб: Профессия, 2003 – 752с.
4. http://www.1000a.ru/catalog-12.htm.