 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Проектирование управляемого привода в электромеханических системах
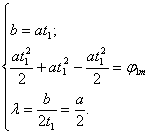
Для нахождения параметров траектории решим систему уравнений (1.6), приравняв значения угла поворота и скорости нагрузки в общих для сопряженных участках точках.
 , (1.7)
, (1.7)
 . (1.8)
. (1.8)
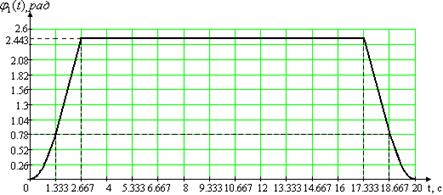
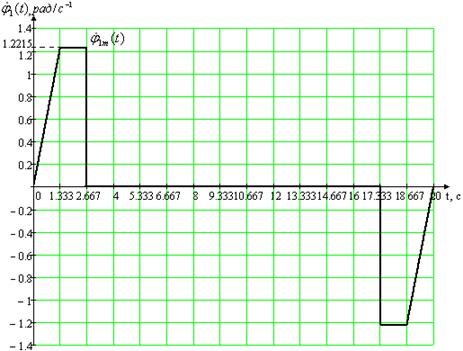
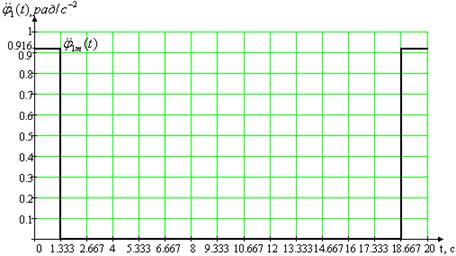
Рис. 1.1. Первая из двух возможных траекторий рабочего цикла для первого привода
Из первого уравнения системы (1.8) получим формулу для параметра b и подставим его в третье выражение, а затем функциональные зависимости для параметров a и b – во второе уравнение
 , (1.10)
, (1.10)
Получим численные значения параметров a, b и :
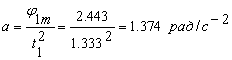 ,
,
![]() ,
,
![]()
Таблица 1.4
|
t, c |
|
|
|
| [0; 1.333] |
|
1.374t |
1.374 |
| [1.333; 2.667] |
|
|
|
| [2.667; 17.333] |
|
0 | 0 |
| [17.333; 18.667] |
|
|
|
| [18.667; 20] |
|
|
1.374 |
Максимальные значения:
а) угла поворота нагрузки 1m(t) = 2.443 рад,
б) угловой скорости нагрузки p1m(t) = 1.833 рад/c-1,
в) углового ускорения нагрузки p21m(t) = 1.374 рад/c-2.
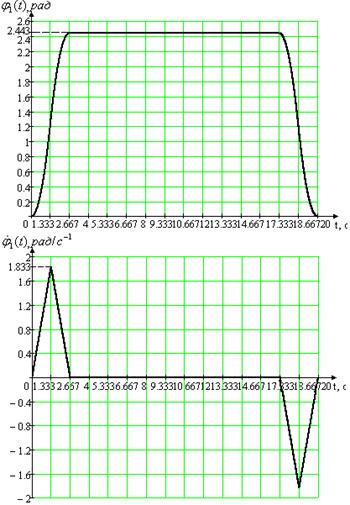
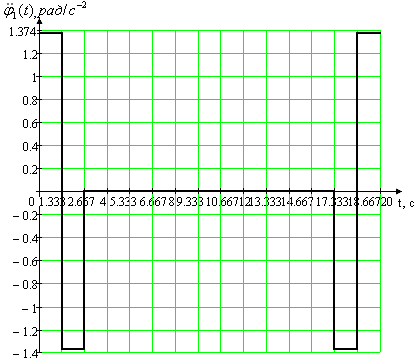
Рис. 1.2. Вторая из двух возможных траекторий рабочего цикла для первого привода
1.2 Расчет статической и динамической нагрузки на проектируемый привод
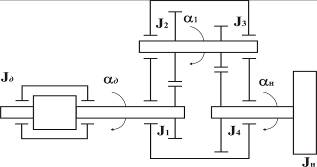
Рис. 1.3. Многомассовая нагрузка привода
При определении энергетических параметров
проектируемого привода сложную многомассовую нагрузку привода (рис. 1.3) приводят
к одному валу – валу двигателя. Для этого многомассовую нагрузку с мощностью ![]() заменяют маховиком той же
мощности на валу двигателя
заменяют маховиком той же
мощности на валу двигателя ![]() и
вращающимся со скоростью вала двигателя.
и
вращающимся со скоростью вала двигателя.
![]() , (1.11)
, (1.11)
где ![]() –
к.п.д. механической передачи от вала нагрузки к валу двигателя.
–
к.п.д. механической передачи от вала нагрузки к валу двигателя.
С другой стороны,
![]() ,
, ![]() (1.12)
(1.12)
где ![]() –
момент приведенной нагрузки к валу двигателя,
–
момент приведенной нагрузки к валу двигателя, ![]() –
момент на валу нагрузки,
–
момент на валу нагрузки, ![]() ,
, ![]() – угловые скорости вала
двигателя и вала нагрузки, соответственно (рис. 1.3),
– угловые скорости вала
двигателя и вала нагрузки, соответственно (рис. 1.3), ![]() .
Подставляя (1.12) в (1.11), получаем:
.
Подставляя (1.12) в (1.11), получаем:
![]() ,
,
откуда:
![]() ,
,
где ![]() –
передаточное отношение механической передачи между валом двигателя и валом
нагрузки (передаточное число редуктора).
–
передаточное отношение механической передачи между валом двигателя и валом
нагрузки (передаточное число редуктора).
Моменты, действующие на валу нагрузки, можно
разделить на две группы. К первой группе относятся динамические моменты ![]() , величина которых пропорциональна
ускорениям и моментам инерции движущихся масс нагрузки. Ко второй группе
относятся моменты статические
, величина которых пропорциональна
ускорениям и моментам инерции движущихся масс нагрузки. Ко второй группе
относятся моменты статические ![]() ,
связанные с противодействующими усилиями: моменты сухого и вязкого трения,
момент статического сопротивления подъему груза.
,
связанные с противодействующими усилиями: моменты сухого и вязкого трения,
момент статического сопротивления подъему груза.
Таким образом, момент нагрузки, приведенный к валу двигателя,
![]() . (1.13)
. (1.13)
Динамические моменты нагрузки приводов
Динамический момент нагрузки первого привода определяется уравнением
![]() , (1.14)
, (1.14)
где ![]() –
ускорение на валу нагрузки;
–
ускорение на валу нагрузки; ![]() – момент
инерции нагрузки.
– момент
инерции нагрузки.
Нагрузка первого привода является телом сложной
конфигурации, поэтому ![]() определим как
сумму моментов инерции отдельных частей нагрузки относительно оси вращения 1–1:
определим как
сумму моментов инерции отдельных частей нагрузки относительно оси вращения 1–1:
![]() (1.15)
(1.15)
Динамический момент инерции третьего звено J3 принимает значения в диапазоне от J3 min до J3 max. Масса груза, зажатого в захватном устройстве m, может меняться в пределах от mmin до mmax. Изменение данных параметров приводит к изменению момента инерции нагрузки J.
Определим минимальное и максимальное значение момента инерции нагрузки J:


Наибольшего значения величина динамического момента нагрузки привода достигает при максимальном угловом ускорении рабочей нагрузки
![]() (1.16)
(1.16)
Определим максимальный динамический момент нагрузки привода для первой возможной траектории рабочего цикла первого привода по формуле 1.16.
![]()
Определим максимальный динамический момент нагрузки привода для второй возможной траектории рабочего цикла первого привода:
![]()
Статические моменты нагрузки приводов
Движению в механизмах поворота противодействуют статические моменты сопротивления: моменты вязкого и сухого трения, характерные для зубчатых передач механизмов поворота.
Момент вязкого трения пропорционален угловой скорости вала нагрузки и определяется уравнением:
![]() (1.17)
(1.17)
где ![]() –
коэффициент вязкого трения, зависящий от вязкости и температуры смазывающих
масел.
–
коэффициент вязкого трения, зависящий от вязкости и температуры смазывающих
масел.
Момент сухого трения в большинстве случаев считают независимым от скорости и направленным против нее:
![]() (1.18)
(1.18)
здесь ![]() .
.
Согласно (1.17), (1.18), статический момент нагрузки первого привода
![]() (1.19)
(1.19)
а его максимальное значение
![]() (1.20)
(1.20)
По формуле 1.20 найдем максимальный статический момент нагрузки привода для первой возможной траектории рабочего цикла:
![]() .
.
По формуле 1.20 найдем максимальный статический момент нагрузки привода для второй возможной траектории рабочего цикла:
![]() .
.
1.3 Предварительный выбор двигателя
Исходными данными для выбора двигателя являются
приведенный к валу двигателя момент рабочей нагрузки ![]() , максимальные значения
скорости и ускорения нагрузки, определяемые по возможным траекториям рабочего
цикла.
, максимальные значения
скорости и ускорения нагрузки, определяемые по возможным траекториям рабочего
цикла.
Выбор исполнительного двигателя начнем с
расчета требуемой максимальной мощности ![]() на
валу двигателя в рабочем режиме. При этом предположим, что нагрузка
перемещается с максимально возможными скоростью и ускорением. Мощность
двигателя должна быть достаточной для обеспечения этого режима, наиболее
тяжелого для двигателя.
на
валу двигателя в рабочем режиме. При этом предположим, что нагрузка
перемещается с максимально возможными скоростью и ускорением. Мощность
двигателя должна быть достаточной для обеспечения этого режима, наиболее
тяжелого для двигателя.
Для первого привода, осуществляющего поворот ![]() , требуемая мощность
, требуемая мощность ![]() исполнительного двигателя,
с учетом (1.14) и (1.19):
исполнительного двигателя,
с учетом (1.14) и (1.19):
![]() . (1.21)
. (1.21)
По формуле 1.21 вычислим требуемую мощность двигателя для отработки первой из двух возможных траекторий движения рабочей нагрузки:
![]() .
.
По формуле 1.21 вычислим требуемую мощность двигателя для отработки второй из двух возможных траекторий движения рабочей нагрузки
![]() .
.
Выберем исполнительный двигатель с номинальной
мощностью не меньшей ![]() .
.
Выбор будем осуществлять согласно следующим критериям:
1. ![]() –
привод ПР работает в интенсивных динамических режимах требующих высокого
быстродействия, поэтому необходимо выбирать двигатель с минимальным собственным
моментом инерции,
–
привод ПР работает в интенсивных динамических режимах требующих высокого
быстродействия, поэтому необходимо выбирать двигатель с минимальным собственным
моментом инерции,
2. ![]() – при
уменьшении массы двигателя – уменьшается статические и динамические нагрузки на
1 и 2 приводы в ПР,
– при
уменьшении массы двигателя – уменьшается статические и динамические нагрузки на
1 и 2 приводы в ПР,
3. ![]() –
т. к. увеличивается качество регулирования,
–
т. к. увеличивается качество регулирования,
4. ![]() –
поскольку уменьшение сопротивления в якорной цепи приводит к снижению нагрева
двигателя,
–
поскольку уменьшение сопротивления в якорной цепи приводит к снижению нагрева
двигателя,
5. ![]() – чем
ниже скорость вращения двигателя, тем меньшее передаточное число требуется
обеспечить, а, следовательно, выбрать более простой редуктор, подходящий по
массогабаритным характеристикам и его КПД,
– чем
ниже скорость вращения двигателя, тем меньшее передаточное число требуется
обеспечить, а, следовательно, выбрать более простой редуктор, подходящий по
массогабаритным характеристикам и его КПД,
6. ![]() –
больший ток в якорной цепи обеспечивает выше номинальный момент двигателя
(мощность).
–
больший ток в якорной цепи обеспечивает выше номинальный момент двигателя
(мощность).
![]() (1.22)
(1.22)
Согласно (1.22), для первой траектории будем
выбирать двигатель, придерживаясь данных значений мощности: ![]() .
.
Для обеспечения движения рабочей нагрузки по первой из двух рассматриваемых траекторий наиболее подходящими приводами являются двигатели [1], приведенные в таблице 1.5.
Таблица 1.5
|
Серия двигателя |
Тип двигателя |
Pд ном, Вт |
nд ном, рад/с |
Uя ном, В |
Iя ном, А |
Rя, Ом |
Jд.10-6 кг∙м2 |
Tяц, мс |
mд, кг |
| ДВИ | ДВИ-211–02 | 120 | 628 | 27 | 7.4 | 1.3 | 23 | 0.50 | 3.4 |
| СД | СД-150 | 150 | 786 | 60 | 4.2 | 2.8 | 193 | 0.3 | 2.7 |
Для второй траектории, ![]() .
.
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |