 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Проектирование управляемого привода в электромеханических системах
2.2 Синтез структурной схемы управляемого привода
Синтез структурной схемы привода начинают с разработки его функциональной схемы.
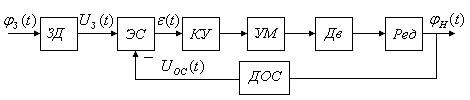
Рис. 2.1. Функциональная схема управляемого привода
На рис. 2.1 обозначено:
ЗД − задающий датчик (преобразовывает механический сигнал в электрический);
ЭС − элемент сравнения (в данном случае сумматор);
КУ − корректирующее устройство;
УМ − усилитель мощности (формирует напряжение в якорную цепь двигателя);
Дв – двигатель, преобразующий напряжение на его входе в угловое перемещение на его выходном валу;
Ред – редуктор, понижающий значение углового перемещения на выходном валу двигателя до величины перемещения, необходимого для управления положением рабочей нагрузки;
ДОС – датчик обратной связи, обеспечивающий преобразование физического сигнала в форму, удобную для сравнения.
Линеаризованная структурная схема двигателя постоянного тока (ДПТ) с независимым возбуждением при управлении по цепи якоря, составленная для приращений переменных двигателя в относительных единицах (о.е.), представлена на рис. 2.2.
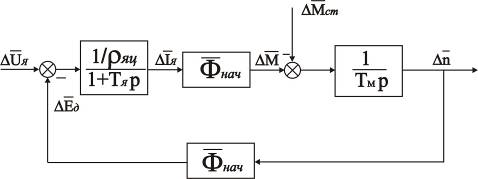
Рис. 2.2. Линеаризованная структурная схема ДПТ в о.е.
На схеме (рис. 2.2) обозначено:
![]() – приращение напряжения управления,
– приращение напряжения управления, ![]() .
.
![]() – приращение ЭДС,
– приращение ЭДС, ![]() .
.
![]() – приращение
тока в цепи якоря,
– приращение
тока в цепи якоря, ![]() .
.
![]() – значение магнитного потока двигателя в рабочей точке.
– значение магнитного потока двигателя в рабочей точке.
![]() . (2.6)
. (2.6)
![]() – относительное
сопротивление якорной цепи.
– относительное
сопротивление якорной цепи.
![]() . (2.7)
. (2.7)
![]() – приращение приведенного к валу двигателя статического момента
нагрузки,
– приращение приведенного к валу двигателя статического момента
нагрузки, ![]() .
.
![]() – приращение момента, развиваемого двигателем,
– приращение момента, развиваемого двигателем, ![]() .
.
![]() – постоянная якорной цепи, определяемая отношением реактивного
– постоянная якорной цепи, определяемая отношением реактивного
![]() и активного
и активного ![]() сопротивлений цепи.
сопротивлений цепи.
![]() – приращение угловой скорости вала двигателя,
– приращение угловой скорости вала двигателя, ![]()
![]() .
.
![]() – механическая
постоянная двигателя.
– механическая
постоянная двигателя.
![]() , (2.8)
, (2.8)
где ![]() – динамический
момент инерции на валу двигателя,
– динамический
момент инерции на валу двигателя,
![]() . (2.9)
. (2.9)
За
базовые значения угловой скорости вала двигателя ![]() ,
момента двигателя
,
момента двигателя ![]() , напряжения
, напряжения ![]() и тока в цепи якоря
и тока в цепи якоря ![]() принимают их номинальные
значения.
принимают их номинальные
значения.
Двигатель имеет переменный параметр – ![]() , меняющийся от некоторого
минимального
, меняющийся от некоторого
минимального ![]() до максимального
значения
до максимального
значения ![]() вслед за изменением
моментов нагрузки. При синтезе управляющего устройства выбирают регулятор, способный
обеспечить требуемое качество управления приводом при любом значении
вслед за изменением
моментов нагрузки. При синтезе управляющего устройства выбирают регулятор, способный
обеспечить требуемое качество управления приводом при любом значении ![]() из известного
диапазона. Величину статического момента нагрузки
из известного
диапазона. Величину статического момента нагрузки ![]() ,
являющегося возмущающим воздействием для двигателя, при синтезе привода
принимают максимальной.
,
являющегося возмущающим воздействием для двигателя, при синтезе привода
принимают максимальной.
Для использования структурной схемы двигателя в общей структуре привода необходимо осуществить в схеме переход от относительных единиц измерения (о.е.) к абсолютным единицам (а.е.).
Передаточные функции двигателя по управляющему и возмущающему воздействиям в а.е. могут быть получены из соответствующих им выражений в о.е. при использовании базовых значений параметров, выбранных для совершения прямого перехода в схеме.
За базовое значение магнитного потока двигателя
![]() примем его
номинальное значение
примем его
номинальное значение ![]() . Рабочее
значение магнитного потока
. Рабочее
значение магнитного потока ![]() выбираем
в рабочем интервале
выбираем
в рабочем интервале ![]() . Пусть
. Пусть ![]() .
.
Используя структурную схему двигателя в
относительных единицах (рис. 2.2) и приведенные выше базовые значения
переменных, преобразуем схему, введя масштабирующие коэффициенты,
обеспечивающие измерение в абсолютных единицах передаточных функций двигателя
по управляющему ![]() и
возмущающему
и
возмущающему ![]() воздействиям
(рис. 2.3).
воздействиям
(рис. 2.3).
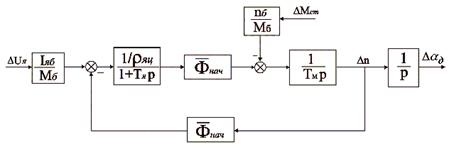
Рис. 2.3. Линеаризованная структурная схема ДПТ с передаточными функциями в абсолютных единицах (а.е.)
Приведем все необходимые параметры для дальнейших расчетов схемы.
Двигатель 2ПБ90МУХЛ4
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Редуктор червячный одноступенчатый 5Ч 80
![]() ;
;
![]() .
.
Траектория рабочего цикла
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Магнитный поток двигателя в рабочей точке (формула 2.6):
![]() .
.
![]() .
.
Относительное сопротивление якорной цепи (формула 2.7):
![]()
Возмущающее воздействие
![]() ;
;
![]() .
.
Для нахождения механической постоянной
двигателя ![]() определим суммарные
минимальное и максимальное значения момента инерции на валу двигателя согласно
формуле 2.9:
определим суммарные
минимальное и максимальное значения момента инерции на валу двигателя согласно
формуле 2.9:
![]() ,
,
![]() .
.
Минимальное и максимальное значение механической постоянной двигателя
![]() ,
,
![]() .
.
Передаточная функция двигателя по управляющему воздействию
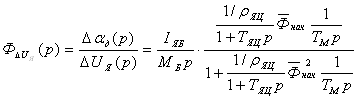 ,
,
![]() ,
,
Разделим числитель и знаменатель передаточной
функции на ![]() :
:
 , где
, где  .
.
Найдем минимальное и максимальное значение
электромеханической постоянной времени двигателя ![]() :
:
![]() ,
,
![]() .
.
Заметим, что если представить, что ![]() , тогда полученная
передаточная функция эквивалентна передаточной функции колебательного звена:
, тогда полученная
передаточная функция эквивалентна передаточной функции колебательного звена:
![]() . (2.10)
. (2.10)
Если ![]() < 1,
то выражение (2.10) – произведение передаточных функций интегратора и
колебательного звена.
< 1,
то выражение (2.10) – произведение передаточных функций интегратора и
колебательного звена.
Если ![]()
![]() 1, то выражение (2.10)
– произведение передаточных функций интегратора и двух последовательно
соединенных апериодических звеньев.
1, то выражение (2.10)
– произведение передаточных функций интегратора и двух последовательно
соединенных апериодических звеньев.
Определим параметры данной передаточной функции из следующей пары уравнений:
![]() , (2.11)
, (2.11)
![]() . (2.12)
. (2.12)
Из уравнения 2.12 выразим параметр ![]() :
:
 (2.13)
(2.13)
Из уравнения (2.11) определим минимальное и
максимальное значения постоянной времени ![]() :
:
![]() ,
,
![]() .
.
Определим значения параметра ![]() при максимальном и
минимальном значениях механической постоянной времени:
при максимальном и
минимальном значениях механической постоянной времени:
![]() ,
,
![]() .
.
Найденные значения ![]() ,
поэтому представим передаточную функцию двигателя как передаточную функцию двух
последовательно соединенных апериодических звеньев. Для этого решим уравнения:
,
поэтому представим передаточную функцию двигателя как передаточную функцию двух
последовательно соединенных апериодических звеньев. Для этого решим уравнения:
![]() , (2.14)
, (2.14)
![]() (2.15)
(2.15)
Решим уравнение (2.14):
![]() .
.
Корни уравнения:
![]()
 ,
,
где ![]() .
.
![]() .
.
![]() . (2.16)
. (2.16)
Аналогично решим уравнение 2.15:
![]()
Корнями данного уравнения являются:
![]()
Таким образом, получим:
 .
.
Определим коэффициент передачи двигателя:
![]() .
.
![]() . (2.17)
. (2.17)
Передаточная функция двигателя по возмущающему воздействию
Разделим числитель и знаменатель передаточной
функции на ![]() :
:
 .
.
 . (2.18)
. (2.18)
Заметим, что знаменатель передаточной функции двигателя по возмущающему воздействию совпадает со знаменателем передаточной функции по управляющему воздействию. Поэтому представим знаменатель функции (2.18) в следующем виде:
 , где
, где  .
.
![]() , где
, где ![]() .
.
Коэффициенты передачи двигателя:
![]() ,
,
![]() ,
,
![]() .
.
Для дальнейшего использования составим таблицу со всеми найденными параметрами передаточных функций двигателя (таблицу 2.2).
Таблица 2.2. Значения параметров ПФ двигателя
|
Параметр |
Значения |
|
|
|
|
|
|
ТМ, c |
3.196 | 3.936 |
|
ТЭМ, c |
0.686 | 0.845 |
|
ТК, c |
0.1257 | 0.1395 |
|
|
2.727 | 3.027 |
|
Т1, c |
0.024 | 0.821 |
|
Т2, c |
0.662 | 0.024 |
|
КДВ Вб-1 (ПФ по управляющему воздействию) |
3.501 | |
|
КДВ, Вб-1 (ПФ по возмущению) |
21.5232 | |
Изобразим структурную схему управляемого привода (рис. 2.4).
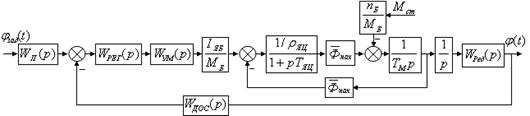
Рис. 2.4. Структурная схема управляемого привода
Передаточные функции отдельных звеньев привода:
– ![]() –
передаточная функция задающего устройства;
–
передаточная функция задающего устройства;
– ![]() –
передаточная функция корректирующего устройства;
–
передаточная функция корректирующего устройства;
– ![]() –
передаточная функция усилителя мощности;
–
передаточная функция усилителя мощности;
–![]() – передаточная
функция двигателя по управляющему воздействию;
– передаточная
функция двигателя по управляющему воздействию;
–![]() –
передаточная функция двигателя по возмущающему воздействию;
–
передаточная функция двигателя по возмущающему воздействию;
– ![]() –
передаточная функция редуктора;
–
передаточная функция редуктора;
– ![]() –
передаточная функция датчика обратной связи.
–
передаточная функция датчика обратной связи.
2.3 Синтез структуры регулятора
В структуре управляемого привода два модуля: силовой и управляющий. Управляющий модуль состоит из измерителя рассогласований и регулятора. Для того чтобы система удовлетворяла требованиям технического задания, необходимо провести синтез регулятора.
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |