 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Дипломная работа: Моделирование нагрева асинхронного двигателя
11. Средняя длина витка обмотки lср1=0,722 м;
12. Развернутая длина лобовой части обмотки с одной стороны lл=0,256 м;
13. Длина вылета лобовой части обмотки с одной стороны lл.в=70∙10-3 м;
14. Диаметр изолированного проводника dи=1,28 мм;
15. Коэффициент пропитки обмотки kп=0,9;
16. Обмоточный коэффициент kобм=0,958;
17. Толщина окраски обмотки в лобовой части δокр=0 м;
Параметры пазовой изоляции
2. Толщина пазовой изоляции δи.п=0,25∙10-3 м.
Общие физические величины
11. Кинематическая вязкость воздуха ν=15,8∙10-6 м2/с;
12. Коэффициент теплопроводности воздуха λв=0,03 Вт/(оС∙м);
13. Средняя температура обмотки Tср=100 оС;
14. Коэффициент теплопроводности меди обмотки λм=384 Вт/(оС∙м);
15. Коэффициент теплопроводности алюминия клетки λа=189 Вт/(оС∙м);
16. Коэффициент теплопроводности материала станины λст=160 Вт/(оС∙м);
17. Коэффициент теплопроводности стали пакета статора λс=34 Вт/(оС∙м);
18. Коэффициент теплопроводности пропиточного состава обмотки λп=0,28 Вт/(оС∙м);
19. Коэффициент теплопроводности изоляции проводов λи=0,26 Вт/(оС∙м);
20. Коэффициент теплопроводности окраски обмотки в лобовой части λокр=0,2 Вт/(оС∙м);
21. Коэффициент теплопроводности пазовой изоляции λи.п=0,41 Вт/(оС∙м);
22. Плотность меди γм=8,89∙103 кг/м3;
23. Плотность стали γст=7,65∙103 кг/м3;
24. Удельная теплоемкость меди см=386 Дж/(кг∙К);
25. Удельная теплоемкость стали сст=500 Дж/(кг∙К).
В результате расчета в MatLab 6.1 получены следующие результаты:
1. Коэффициент теплоотдачи от меди к окружающему воздуху А1=0,5046 Вт/0С.
2. Коэффициент теплоотдачи от стали к окружающему воздуху А2=46,7726 Вт/0С.
3. Коэффициент теплоотдачи от меди к стали А12=9,7796 Вт/0С.
4. Теплоемкость меди С1=2577,1 Дж/0С.
5. Теплоемкость стали С2=1036,6 Дж/0С.
Так как цель данного дипломного проекта – это создание лабораторной работы, поэтому в Приложении Б приведены исходные данные к расчету еще для четырех двигателей серии 4А: 4А180М2У3, 4А132М4У3, 4А180М4У3, 4А225М4У3.
4. Моделирование процессов нагрева и охлаждения асинхронного двигателя в различных режимах работы. Рекомендации по выбору асинхронных двигателей по нагреву
Исследуем стандартные режимы работы асинхронных двигателей, установленные ГОСТ 183–74: S1, S2, S3.
Режим S1 – это режим продолжительной работы при постоянной нагрузке.
Режим S2 – режим кратковременной нагрузки. Двигатель в режиме S2 работает при постоянной нагрузке в течение времени меньшего, чем требуется для получения теплового равновесия, с последующим отключением на время, за которое температура двигателя становится равной температуре окружающей среды. Характеризуемой величиной в этом режиме служит продолжительность работы. Стандартные значения, установленные ГОСТ 183–74: 10, 30, 60, 90 минут.
Режим S3 – режим повторно-кратковременной нагрузки. Характеризуется последовательностью идентичных циклов, каждый из которых состоит из периодов работы двигателя при постоянной нагрузке и периодов отключения, причем длительность периодов работы недостаточна для достижения теплового равновесия за время одного рабочего цикла. Этот режим характеризуется продолжительностью включения (ПВ), которая равна:
 , (4.1)
, (4.1)
где tp – время работы;
tо – время отключения.
В ГОСТ 183–74 устанавливаются стандартные значения ПВ: 15%, 25%, 40%, 60%. Продолжительность одного цикла, если не оговорок, принимается равной десяти минутам.
Рассмотрим процессы нагрева на примере асинхронного двигателя закрытого исполнения марки 4А132М2У3. При моделировании температура окружающего воздуха принималась равной 100С, начальные температуры меди и стали равны температуре окружающего воздуха. По графику видно, что средняя температура меди достигает установившегося значения 82,730С за 2000 секунд.
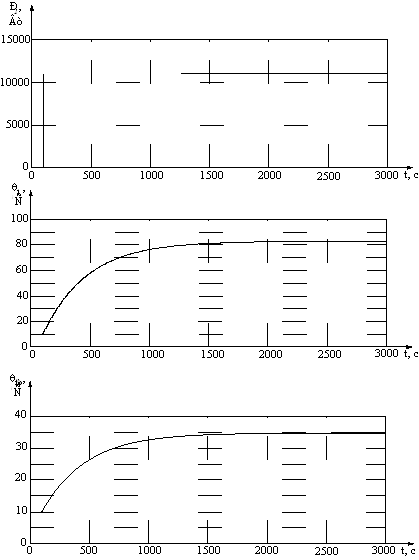
Рисунок 4.1 – График изменения нагрузки и температур меди и стали в режиме S1 (θв=100С)
Графики изменения нагрузки и температур меди и стали в режиме S2 приведены на рисунке 4.2. Продолжительность работы здесь равна 10 минутам, температура окружающей среды и начальные температуры меди и стали равны 100С.
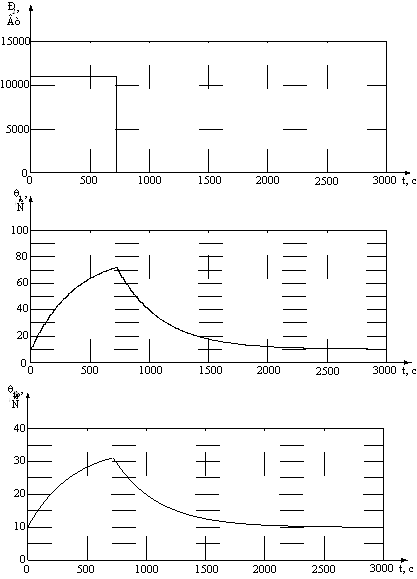
Рисунок 4.2 – Графики изменения нагрузки и температур меди и стали в режиме S2 (θв=100С)
По графику видно, что средняя температура меди не достигает установившегося состояния, ее максимум равен 72,30С. После отключения обмотка остывает до температуры окружающей среды, то есть до 100С, за 1800 секунд.
Графики изменения нагрузки и температур меди и стали в режиме S3 приведены на рисунке 4.3.
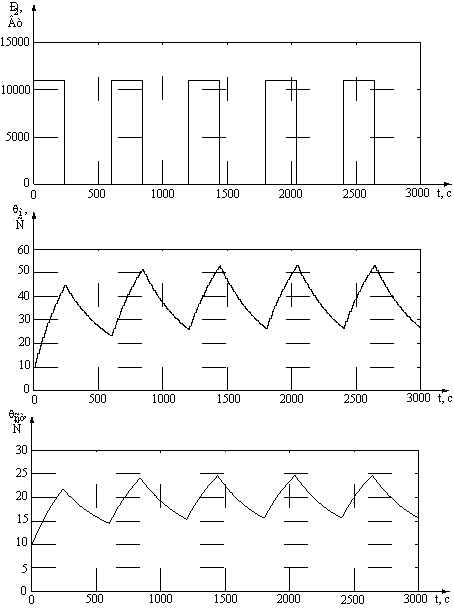
Рисунок 4.3 – Графики изменения нагрузки и температур меди и стали в режиме S3 (θв=100С)
Продолжительность включения ПВ=40%, температура окружающей среды и начальные температуры меди и стали равны 100С. По графику видно, что средняя температура меди не достигает установившегося состояния, ее максимум равен 53,20С. Установившееся состояние наступает через три цикла.
На рисунках 4.4–4.6 приведены графики изменения нагрузки и температур меди и стали в режимах S1, S2 и S3 соответственно, при температуре окружающего воздуха 400 С. Начальные температуры меди и стали равны температуре окружающего воздуха.
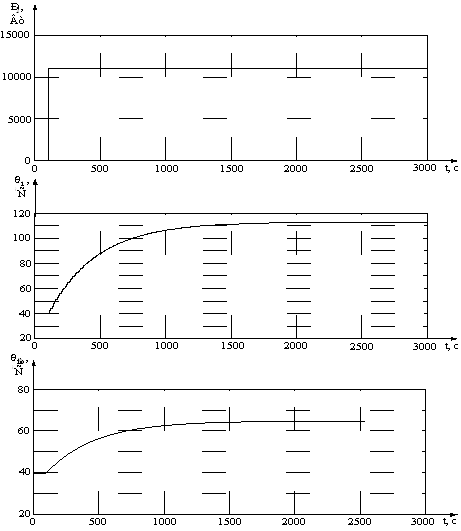
Рисунок 4.4 – Графики изменения нагрузки и температур меди и стали в режиме S1 (θв=400С)
По графику изменения температуры меди в режиме S1 (см. рисунок 4.4) видно, что установившееся значение температуры равно 1130 С. Это значение меньше установленного ГОСТ 183–74 предельное значение температуры для изоляции класса В – 1200 С.
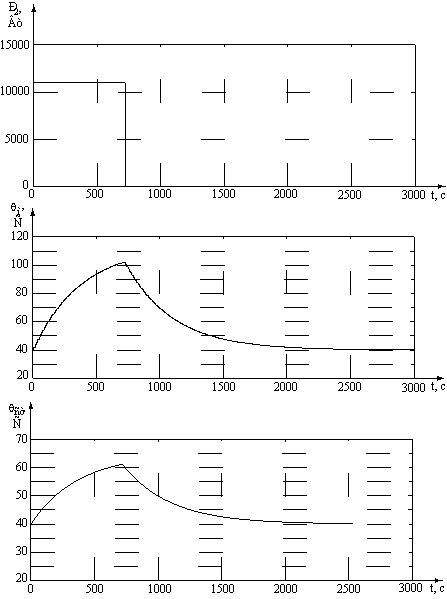
Рисунок 4.5 – Графики изменения нагрузки и температур меди и стали в режиме S2 (θв=400С)
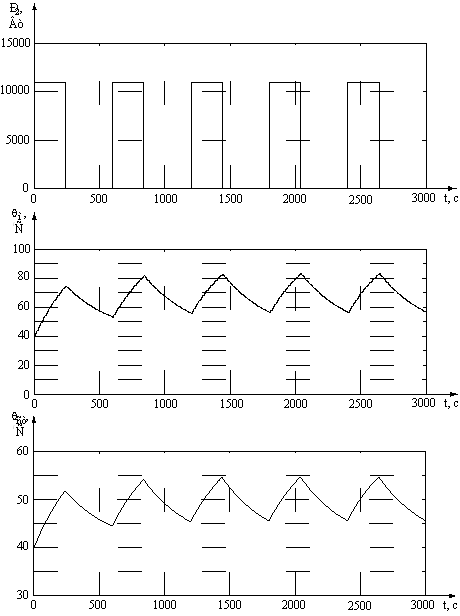
Рисунок 4.6 – Графики изменения нагрузки и температур меди и стали в режиме S3 (θв=400С)
При проектировании электропривода встает задача выбора асинхронного двигателя по мощности. Если мощность, требуемая на исполнительном органе рабочего механизма, больше чем мощность двигателя, то последний перегревается и может выйти из строя; если мощность нагрузки меньше мощности двигателя, то ухудшаются его энергетические характеристики (коэффициент полезного действия η, коэффициент мощности cosφ). Задача выбора двигателя осложняется тем, что нагрузка на валу не остается постоянной, а меняется во времени. Для того чтобы решить вопрос выбора мощности двигателя, необходимо знать зависимость изменения нагрузки во времени.
Таким образом, основной целью при выборе асинхронного двигателя по нагреву является наиболее полное его использование по мощности.
Предельные значения температур обмоток для разных классов изоляции устанавливаются ГОСТ 183–74. Предельные температуры обмотки для классов пазовой изоляции приведены в таблице 4.1.
Таблица 4.1
| Класс нагревостойкости изоляции | B | F | H |
|
Предельно допускаемые температуры обмоток машин, 0С |
120 | 140 | 165 |
|
Предельно допускаемые превышения температуры обмоток машин, 0С |
80 | 100 | 125 |
При работе привода в режиме продолжительной работы с постоянной нагрузкой (S1) перегрузка двигателя недопустима, то есть мощность нагрузки должна быть меньше либо равна установленной мощности двигателя. Причиной этого является то, что при номинальной нагрузке температура меди обмотки близка к предельно допустимой.
При работе привода в кратковременном режиме с постоянной нагрузкой (S2) имеется возможность получить от двигателя мощность больше паспортной. Это объясняется тем, что в кратковременном режиме работы температура обмотки не достигает установившегося значения, а при отключении от сети двигатель остывает до температуры окружающей среды. Величина допустимой перегрузки в первую очередь зависит от продолжительности работы двигателя.
При работе электропривода в повторно-кратковременном режиме (S3), температура обмотки в течение одного цикла не достигает установившегося значения, а при отключении двигателя от сети, он не успевает остыть до температуры окружающей среды. Поэтому в этом режиме, так же как и в режиме S2, возможна некоторая перегрузка двигателя. Величина допустимой перегрузки определяется продолжительностью включения, а именно временем работы и временем отключения.
На практике режимы работы электропривода отличаются от стандартизированных режимов. В этом случае, зная характер изменения нагрузки, можно смоделировать соответствующий режим на ЭВМ и определить температуру двигателя в конкретном режиме работы.
Однако следует учитывать, что ни одна, даже самая сложная модель асинхронного двигателя не обеспечивает точное решение задачи. Это объясняется, во-первых, приближенностью определения коэффициентов системы дифференциальных уравнений через конструктивные параметры асинхронного двигателя, и, во-вторых, технологическим разбросом характеристик самого двигателя. Так, например, только разброс характеристик материалов, применяемых при изготовлении асинхронных двигателей, может достигать ±18% [2].
Поэтому известные попытки использования устройств защиты асинхронных двигателей, реализованных с помощью тепловых моделей [9,11,12], по мнению автора, не способны обеспечить срабатывание защиты именно в тот момент времени, когда фактическая температура обмотки достигает значения уставки. В публикациях, посвященных этим устройствам защиты, отсутствует оценка погрешности их срабатывания.
Однако для решения задачи выбора двигателя по мощности тепловую модель использовать можно, так как при проектировании электропривода мощность двигателя выбирается с небольшим запасом, который компенсирует погрешность модели.
5. Экономический расчет
Затраты на разработку и реализацию лабораторной работы определяются по формуле:
![]() , (5.1)
, (5.1)
где Сосн,зп – основная заработная плата персонала, руб.;
Сдоп,зп – дополнительная заработная плата персонала, руб.;
Сн,з – налоги на заработную плату, руб.;
Спо – затраты на приобретение программного обеспечения, руб.;
Свт – затраты на содержание и эксплуатацию вычислительной техники, руб.;
Сн – накладные расходы, руб.
Основная заработная плата рассчитывается как:
![]() , (5.2)
, (5.2)
где Тразраб – время необходимое для разработки лабораторной работы, ч;
З – основная заработная плата персонала за один час, руб./ч.
Для разработки лабораторной работы необходимо Тразраб=150 ч. Исполнителем является инженер-программист. Оклад инженера-программиста третьей категории составляет 800 руб. в месяц. При условии, что продолжительность рабочего дня равна 8 ч, а в месяце 22 рабочих дня, основная заработная плата за 1 ч составит:
![]() руб./ч.
руб./ч.
Основная заработная плата инженера-программиста за весь период разработки в соответствии с выражением (5.2) составит:
![]() руб.
руб.
Дополнительная заработная плата рассчитывается в процентах от основной заработной платы и составляет 12%. Дополнительная заработная плата инженера-программиста за весь период разработки составит:
![]() руб.
руб.
Налоги на заработную плату берутся в размере 36,6% от суммы основной и дополнительной заработной платы. Налоги на заработную плату за весь период разработки и реализации лабораторной работы составят:
![]() руб.
руб.
Затраты на приобретение программного обеспечения берутся как стоимость программного обеспечения. Стоимость полного пакета MatLab 6.1, в которой реализуется лабораторная работа, 52500 руб. Следовательно затраты на приобретение программного обеспечения составят:
Спо=52500 руб.
Затраты на содержание и эксплуатацию вычислительного комплекса определяются следующим образом:
![]() , (5.3)
, (5.3)
где см-ч – стоимость машино-часа, руб./ч.
Стоимость машино-часа:
 , (5.4)
, (5.4)
где Сэл,эн – стоимость потребляемой в год электроэнергии, руб.;
А – амортизация в год, руб.;
Срем – затраты на ремонт в год, руб.;
Твт – действительный фонд времени работы вычислительной техники, ч.
Стоимость потребляемой в год электроэнергии:
![]() , (5.5)
, (5.5)
где р – мощность, потребляемая из сети одной ЭВМ, кВт;
Тном – номинальный фонд времени работы ЭВМ в год, ч;
сэ – стоимость 1 кВт/ч электрической энергии, руб./(кВт∙ч).
Мощность, потребляемая из сети одной ЭВМ, р=0,25 кВт. Стоимость 1 кВт∙ч электрической энергии сэ=1,2 руб./(кВт∙ч). При условии, что продолжительность рабочего дня равна 8 ч, а в месяце 22 рабочих дня, номинальный фонд времени работы ЭВМ равен:
Tном=8∙22∙12=2112 ч.
За год отчисления на электрическую энергию составят:
![]() руб.
руб.
Амортизация вычислительной техники считается как 25% от ее балансовой стоимости. Стоимость ЭВМ, необходимой для работы – 15000 руб. Амортизация вычислительной техники за год составит:
![]() руб.
руб.
Затраты на ремонт в год считаются как 4% от стоимости ЭВМ и составляют:
![]() руб.
руб.
Действительный фонд времени работы ЭВМ в год рассчитывается как:
![]() , (5.6)
, (5.6)
где Тном – номинальный годовой фонд времени работы ЭВМ, ч;
Тпроф – годовые затраты времени на профилактические работы (принимаются 10% от Тном), ч.
Действительный фонд времени работы ЭВМ по выражению (5.6):
![]() ч.
ч.
Стоимость машино-часа по выражению (12.4):
 руб./ч.
руб./ч.
Затраты на содержание и эксплуатацию ЭВМ по выражению (5.3):
![]() руб.
руб.
Накладные расходы рассчитываются как 30% от основной заработной платы и составляют:
![]() руб.
руб.
Смета затрат на разработку и реализацию лабораторной работы приведена в таблице 5.1.
Таблица 5.1 – Смета затрат на разработку и реализацию лабораторной работы
| № п/п | Наименование статьи расхода | Цена за единицу, руб. | Кол-во | Стоимость, руб. |
| 1 | Основная заработная плата персонала. | – | – | 681 |
| 2 | Дополнительная заработная плата персонала. | – | 12% | 81,72 |
| 3 | Налоги на заработную плату | – | 36,6% | 279,16 |
| 4 | Программное обеспечение. | 52500 | 1 | 52500 |
| 5 | Содержание и эксплуатация вычислительной техники. | 393 | 1 | 393 |
| 6 | Накладные расходы. | – | 30% | 204,3 |
| ИТОГО: | 54139,18 | |||
Заключение
В процессе дипломирования была решена задача определения параметров тепловой модели асинхронного двигателя. В основе последней лежит представление двигателя двумя коаксиальными цилиндрами. Внешний цилиндр представляет сталь сердечника статора, внутренний – медь обмоток статора. Процессы нагрева и охлаждения в двигателе в этом случае описываются системой дифференциальных уравнений второго порядка. Коэффициенты теплоотдачи входящие в эту систему были определены путем преобразования эквивалентной тепловой схемы асинхронного двигателя закрытого исполнения, содержащей шесть узлов, в схему с двумя узлами. Преобразование тепловой схемы выполнялось для стационарного режима, так как коэффициенты теплоотдачи в переходном и стационарном режимах одинаковы.
Полученные результаты используются в компьютерной лабораторной работе «Моделирование нагрева асинхронного двигателя в различных режимах работы». Лабораторная работа выполнена в программной среде MatLab 6.1, и в ее приложении Simulink 4. Данная работа позволяет моделировать процессы нагрева и охлаждения асинхронного двигателя практически в любых режимах его работы. Изначально для моделирования предлагаются три основных режима работы асинхронного двигателя – S1, S2, S3, но так же имеется возможность задания произвольного режима работы средствами приложения Simulink.
Список использованных источников
1. Алекссев А.Е. Конструкция электрических машин. – М.: ГЭИ, 1949. – 562 с.
2. Борисенко А.И., Костиков А.И., Яковлев А.И. Охлаждение промышленных электрических машин. – М.: Энергоатомиздат, 1983. – 296 с.
3. Исаченко В.П., Осипова В.А., Сукомел А.С. Теплопередача. – М.: Энергоатомиздат, 1981. – 346 с.
4. Сипайлов Г.А., Санников Д.И., Жадан В.А. Тепловые, гидравлические и аэродинамические расчеты в электрических машинах. – М.: Высш. шк., 1989. – 239 с.
5. Филиппов И.Ф. Теплообмен в электрических машинах. – Л.: Энергоатомиздат, 1986. – 256 с.
6. Ковалев В.З. Моделирование электротехнических комплексов и систем как совокупности взаимодействующих подсистем различной физической природы: Дисс. д-ра техн. наук: 05.09.03/ОмГТУ. – Омск, 2000. – 338 с.
7. Ключев В.И. Теория электропривода. – М.: Энергоатомиздат, 1985. – 560 с.
8. Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов. – М.: Машиностроение, 1990. – 238 с.
9. Беспалов В.Я., Мощинский Ю.А., Цуканов В.И. Упрощенная математическая модель нестационарного нагрева и охлаждения обмотки статора асинхронного двигателя. // Электричество. – 2003. – №4. – С. 20–26.
10. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MatLab 6.0. – СПб.: Корона принт, 2001. – 320 с.
11. Синчук О.Н., Чумак В.В., Михайлов С.Л. Тепловая модель кранового АД для диагностирования и настройки цифровой защиты от перегрузок. // Электротехника. – 2003. – №3. – С. 61–65.
12. Бугаев Г.А., Леонтьев А.Н., Ерохин Е.Ю., Павлова Д.А. Математические модели нагрева и охлаждения асинхронных двигателей для микропроцессорного реле тепловой защиты. // Электротехника. – 2001. – №2. – С. 31–36.
13. Гольдберг О.Д., Гурин Я.С., Свириденко И.С. Проектирование электрических машин. – М.: Высш. шк., 1984. – 431 с.
14. Копылов И.П. Электрические машины. – М.: Высш. шк., 2000. – 607 с.
15. Домбровский В.В., Зайчик В.М. Асинхронные машины: Теория, расчет, элементы проектирования. – Л.: Энергоатомиздат, 1990. – 368 с.
16. Дьяконов В.П. MatLab 6/6.1/6.5+Simulink 4/5. Основы применения. Полное руководство пользователя. – М.: СОЛОН-Пресс, 2002. – 768 с.
17. Асинхронные двигатели серии 4А: Справочник/А.Э. Кравчик и др. – М.: Энергоатомиздат, 1982. – 504 с.
Приложение А
Текст m-файла, рассчитывающего параметры тепловой модели
%–1. Исходные данные–%
% Основные параметры
P2=11000;%Номинальная мощность на валу двигателя
KPD=[eps 0.8 0.87 0.88 0.88 0.87];%Коэффициент полезного действия
cosf=[eps 0.65 0.82 0.87 0.9 0.9];%Коэффициент мощности
U1_lin=380;%Номинальное линейное напряжение
n1=3000;%Синхронная частота вращения
m=3;%Количество фаз статора
h=132;%Высота оси вращения, мм
p=1;%Число пар полюсов
% Параметры станины
Dc=0.245;%Диаметр станины у основания ребер
l_svp=0.15;%Длина свисающей части станины со стороны привода
l_svv=0.15;% Длина свисающей части станины со стороны вентилятора
d_dsh=0;%Зазор между диффузором и щитом в месте крепления
Z_rs=12;%Количество ребер станины
h_rs=23*10^(-3);%Высота ребра станины
d_rs=0.002;%Толщина ребра станины
% Параметры вентилятора
D_v=0.214;%Внешний диаметр вентилятора
% Параметры статора
Da=0.225;%Внешний диаметр сердечника
D=0.13;%Внутренний диаметр сердечника
l_p=0.13;%Длина паза
Z1=24;%Число пазов статора
kc=0.97;%Коэффициент шихтовки
%Параметры паза статора
b1=0.0134;%Ширина паза статора у основания
b2=0.0102;%Ширина паза статора в вершине
h_p=0.0165;%Высота паза
k_zp=0.75;% Коэффициент заполнения паза
h_sh=0.0009;%Высота шлица
b_sh=0.004;%Ширина шлица
b_z=0.00656;%Ширина зубца
h_z=0.0165;%Высота зубца
%Параметры ротора
D_rot=0.129;%Внешний диаметр ротора
Z2=19;%Число пазов ротора
b_k=0.025;%Ширина короткозамыкающего кольца
a_k=0.023;%Высота короткозамыкающего кольца
b_l=0.041;%Ширина лопатки ротора
a_l=0.022;%Высота лопатки ротора
n_l=12;%Количество лопаток ротора
KPD_lr=0.6;%Коэффициент качества лопатки, рассматриваемой как ребро
d=0.6*10^(-3);%Толщина воздушного зазора между ротором и статором
%Параметры паза ротора
b1_rot=10.8*10^(-3);%Ширина паза ротора в вершине
b2_rot=7.1*10^(-3);%Ширина паза ротора у основания
h_p_rot=20.2*10^(-3);%Высота паза ротора
% Параметры обмотки статора
w_1=84;%Число витков в фазе обмотки
a=1;%Число параллельных ветвей в фазе обмотки статора
n=3;%Число элементарных проводников в эффективном
l_sr=0.772;%Средняя длина витка обмотки статора
l_lob=0.256;%Развернутая длина лобовой части с одной стороны
l_lobv=0.07;%Длина вылета лобовой части
d_i=1.28;%Диаметр изолированного элементарного проводника обмотки
k_p=0.9;%Коэффициент пропитки обмотки статора
k_obm=0.958;%Обмоточный коэффициент обмотки статора
d_okr=0;%Толщина окраски обмотки в лобовой части
T_sr=100;%Средняя температура обмотки, град
% Параметры изоляции
d_ip=0.25*10^(-3);%Толщина пазовой изоляции
% Коэффициенты, характеризующие физические свойства материалов
v=15.8*10^(-6);%Кинематическая вязкость воздуха
lam_v=0.03;%Коэффициент теплопроводности воздуха
lam_m=384;%Коэффициент теплопроводности меди
lam_a=189;%Коэффициент теплопроводности алюминия клетки
lam_st=47;% Коэффициент теплопроводности материала станины
lam_s=34;% Коэффициент теплопроводности стали пакета статора
lam_p=0.28;% Коэффициент теплопроводности пропиточного состава
lam_i=0.26;% Коэффициент теплопроводности изоляции проводов
lam_okr=0.2;%Коэффициент теплопроводности окраски обмотки в лобовой части
lam_p_iz=0.41;% Коэффициент теплопроводности пазовой изоляции
gamma_m=8.89*(10^3);%Плотность меди обмотки статора
gamma_st=7.65*(10^3);%Плотность стали пакета статора
c_m=386;%Удельная теплоемкость меди обмотки статора
c_st=500;%Удельная теплоемкость стали пакета статора
r_m=(1/57)*(10^(-6));%Удельное сопротивление меди обмотки статора
r_al=(1/22)*(10^(-6));%Удельное сопротивление алюминия клетки ротора
%–2. Промежуточные вычисления–%
%Окружная скорость ротора
u=(pi*n1*D_rot)/60;
% Окружная скорость вентилятора
u_vent=(pi*n1*D_v)/60;
%Эффективная (по меди) ширина паза
b_p_ef=((b1+b2)/2) – 2*d_ip;
%Эффективная (по меди) высота паза
h_p_ef=h_p-2*d_ip-h_sh – ((b2-b_sh)/2);
%Средняя ширина паза
b_p=(b1+b2)/2;
%Внутренний диаметр лобовой части
D_l_vt=D+h_sh+d_ip+(b2-b_sh)/2;
%Внешний диаметр лобовой части
D_l_vsh=D_l_vt+1.4*h_p_ef;
%Диаметр окружности касательной к дну пазов
D_dp=D+2*h_p;
%Эквивалентный коэффициент теплопроводности обмотки
lam_ekv=exp (-4*k_zp)*(4.65*(k_zp^1.5) – 0.7053)*(1+0.81*(d_i^2)-…
0.32*d_i*(1–9.2*k_p+5.2*(k_p^2)))*…
(1+(0.0428*k_zp0.0253)*T_sr)*((lam_p/0.162)^0.33)*((lam_i/0.143)^0.25);
%Эквивалентный коэффициент теплопроводности воздушных прослоек в пазу
lam_v_ekv=2*lam_v*lam_p*(lam_p*k_p+lam_v*(1 – k_p))/(lam_v*lam_p+…
(lam_p*k_p+lam_v*(1-k_p))*(lam_v*k_p+lam_p*(1-k_p)));
%Термическое сопротивление зубца
R_z=h_z/(3*lam_s*b_z*l_p*Z1*kc);
%Площадь меди в пазу статора
F_m=(3*a*w_1*pi*(d_i^2)/(2*Z1))*10^(-6);
%Площадь алюминия в пазу ротора
F_a=(pi/8)*((b1_rot^2)+(b2_rot^2))+(h_p_rot/2)*(b1_rot+b2_rot);
%Выбор толщины воздушных прослоек
if 50<=h<=132
d_vp=0.05*(10^(-3));
elseif 160<=h<=250
d_vp=0.1*(10^(-3));
else
d_vp=0.15*(10^(-3));
end
%–3. Расчет тепловых сопротивлений–%
%–3.1 Сопротивление аксиальное меди статора–%
R_a=(l_p+l_lob)/(12*lam_m*F_m*Z1);
disp ('Сопротивление аксиальное меди статора'); disp (R_a);
%–3.2 Сопротивление между внутренним воздухом и корпусом–%
%Площадь внутренней поверхности свесов станины
F_st_pr=(Da*pi*l_svp)/2;
F_st_v=(Da*pi*l_svv)/2;
%Площадь поверхности подшипникового щита
F_sch=(Da^2)*pi/4;
%Коэффициент теплопередачи внутренней поверхности свесов станины
RE_s=(u*Da)/(2*v);
if h<160
NU_s=43.78*(RE_s^0.17)*((Da-D_l_vsh)/D)^0.25;
else
if d_dsh==0
NU_s=11.64*(RE_s^0.395);
else
NU_s=3*(RE_s^0.495)/ln (1.3*D/(Da-D));
end
end
a_s=NU_s*lam_v/Da;
%Сопротивление между внутренним воздухом и открытыми частями станины
R_st_pr=1/(F_st_pr*a_s);
R_st_v=1/(F_st_v*a_s);
%Коэффициент теплоотдачи внутренней поверхности подшипникового щита
RE_sch=u*(Da+D)/(4*v);
if h<160
NU_sch=8.34*(RE_sch^0.26)*((Da-D)/D)^(-0.5);
else
if d_dsh==0
NU_shs=5.12*(RE_sch^0.48)*(2*Da/(Da+D))^(-0.52);
else
NU_sch=1.01*(RE_sch^0.63)*ln (D/(5.25*d_dsh))*(2*Da/(Da+D))^(-0.52);
end
end
a_sch=(2*NU_sch*lam_v)/(Da+D);
%Сопротивление между внутренним воздухом и подшипниковым щитом
R_sch=1/(F_sch*a_sch);
%Сопротивление между внутренним воздухом и корпусом
R_vk=1/((1/R_st_pr)+(1/R_st_v)+(2/R_sch));
disp ('Сопротивление между внутренним воздухом и корпусом'); disp (R_vk);
%–3.3 Сопротивление между внешним воздухом и корпусом–%
%Расходная скорость на входе в каналы
w_vh=0.45*u_vent;
%Эффективная скорость
w_ef=sqrt((w_vh^2)+0.25*(u_vent^2));
%Шаг ребер
t_r=2*Dc*pi/(2*Z_rs);
%Гидравлический диаметр межреберного канала
d_g=4*h_rs*t_r/(2*h_rs+t_r);
%Коэффициент теплопроводности на входе в канал
RE_ef=w_ef*d_g/v;
NU_vh=0.627*(RE_ef^0.52);
a_vh=NU_vh*lam_v/d_g;
%Коэффициент уменьшения КТО
gamma=0.055*(1-tanh (0.062*((Dc/d_g) – 12.5)));
%Коэффициент теплоотдачи станины над пакетом
a_sp=a_vh*d_g*(1-exp (-gamma*l_p/d_g))/(gamma*l_p);
%Коэффициент теплоотдачи свисающей части станины со стороны привода
a_spr=a_vh*d_g*(1-exp (-gamma*l_svp/d_g))/(gamma*l_svp);
%Коэффициент теплоотдачи свисающей части станины со стороны вентилятора
a_sv=a_vh*d_g*(1-exp (-gamma*l_svv/d_g))/(gamma*l_svv);
%Коэффициент качества ребер станины
mh=h_rs*sqrt (2*a_sp/(d_rs*lam_st));
KPD_r=tanh(mh)/mh;
%Сопротивление между станиной над пакетом и внешним воздухом
R7=1/(a_sp*l_p*(pi*Dc-Z_rs*d_rs+2*h_rs*Z_rs*KPD_r));
%Сопротивление между свисающей частью станины со стороны привода и внешним воздухом
R6=1/(a_spr*l_svp*(pi*Dc-Z_rs*d_rs+2*h_rs*Z_rs*KPD_r));
%Сопротивление между свисающей частью станины со стороны вентилятора и внешним воздухом
R8=1/(a_sv*l_svv*(pi*Dc-Z_rs*d_rs+2*h_rs*Z_rs*KPD_r));
%Коэффициент теплоотдачи внешней поверхности подшипникового щита со стороны привода
a_sch_pr=20+1.6*(u_vent^0.7);
%Коэффициент теплоотдачи внешней поверхности подшипникового щита со стороны вентилятора
if h<160
a_sch_v=20+8.2*(u_vent^0.8);
else
a_sch_v=20+9.4*(u_vent^0.6);
end;
%Площадь поверхности подшипникового щита
F_sch=(Da^2)*pi/4;
%Сопротивление подшипникового щита со стороны привода
R26=1/(a_sch_pr*F_sch);
%Сопротивление подшипникового щита со стороны вентилятора
R11=1/(a_sch_v*F_sch);
%Сопротивление между внешним воздухом и корпусом
R_k=1/((1/R6)+(1/R7)+(1/R8)+(1/R11)+(1/R26));
disp ('Сопротивление между внешним воздухом и корпусом'); disp (R_k);
%–3.4 Сопротивление между медью статора и внутренним воздухом–%
%Продуваемая длина лобовой части обмотки с одной стороны
l_lobp=l_lobv-1.4*b_p;
%Коэффициенты теплоотдачи лобовых частей обмоток статора
RE_vsh=u*D_l_vsh/(2*v);
RE_vt=u*D_l_vt/(2*v);
NU_vsh=0.103*(RE_vsh^0.67);
NU_vt=0.456*(RE_vt^0.6);
a_l_vsh=NU_vsh*lam_v/D_l_vsh;
a_l_vt=NU_vt*lam_v/D_l_vt;
%Сопротивление внешней продуваемой лобовой части обмотки
R1_l_vsh=(0.104*b_p*h_p_ef/(lam_ekv*l_lobp*Z1*((b_p^2)+0.25*…
(h_p_ef^2))))+(0.75*((d_okr/lam_okr)+(1/a_l_vsh))/(l_lobp*Z1*(b_p+…
0.5*h_p_ef)));
%Сопротивление внешней непродуваемой лобовой части обмотки
R2_l_vsh=((h_p_ef/(3*lam_ekv))+(d_okr/lam_okr)+(1/a_l_vsh))/…
(pi*D_l_vsh*(l_lobv-l_lobp));
%Сопротивление внутренней продуваемой лобовой части обмотки
R1_l_vt=(0.104*b_p*h_p_ef/(lam_ekv*l_lobp*Z1*((b_p^2)+0.25*…
(h_p_ef^2))))+(0.75*((d_okr/lam_okr)+(1/a_l_vt))/(l_lobp*Z1*(b_p+…
0.5*h_p_ef)));
%Сопротивление внутренней непродуваемой лобовой части обмотки
R2_l_vt=((h_p_ef/(3*lam_ekv))+(d_okr/lam_okr)+(1/a_l_vt))/…
(pi*D_l_vt*(l_lobv-l_lobp));
%Сопротивление между медью и внутренним воздухом
R_m_v=1/((1/R1_l_vsh)+(1/R2_l_vsh)+(1/R1_l_vt)+(1/R2_l_vt));
disp ('Сопротивление между медью статора и внутренним
воздухом'); disp (R_m_v);
%–3.5 Сопротивление между медью и сердечником статора–%
%Сопротивление отводу теплоты через дно паза
R20=((h_p_ef/(3*lam_ekv))+(d_ip/lam_p_iz)+(d_vp/lam_v_ekv))/…
(b_p_ef*l_p*Z1);
%Внутреннее сопротивление обмотки
R_vn=b_p_ef/(12*lam_ekv*h_p_ef*l_p*Z1);
%Сопротивление пазовой изоляции
R_ip=(d_ip/lam_p_iz)/(2*h_p_ef*l_p*Z1);
%Сопротивление воздушных прослоек
R_vp=d_vp/(2*lam_v_ekv*h_p_ef*l_p*Z1);
%Сопротивление между пазовой частью обмотки и зубцами
R17=R_vn+R_ip+R_vp;
%Сопротивление, учитывающее разное сопротивление спинки серднчника собственному и внешнему тепловым потокам