 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Дипломная работа: Разработка оборудования для уплотнения балластной призмы
![]()
Максимальный изгибающий момент в т.4 под дебалансом.
Приведённый момент:
![]() ,(2.64)
,(2.64)
где α – коэффициент учитывающий соответствие центров касательного и нормального напряжения (α = 0,75 [4]); T – крутящий момент, Н·м.
T =Ft·d/2 ,(2.65)
где d – делительный диаметр шестерни (d = 0,25 м);
T =777·0,25/2=91,125 Н·м.
![]() .
.
Диаметр вала по формуле:
 ,(2.66)
,(2.66)
![]() .
.
Окончательно принимается диаметр вала d = 0,04 м.
2.4.1.1 Выбор подшипников
Ранее принятый подшипник (см. п.2.4.1) проверяем на динамическую грузоподъёмность:
Стабл. >Cрасч,(2.67)
где Стабл. – динамическая грузоподъёмность взятая из таблицы [3], (Стабл. = 44,9 кН); Cрасч. – динамическая грузоподъёмность полученная методом расчёта, кН.
Cрасч. = L1/P·P,(2.68)
где p – показатель степени (для шарикоподшипников p = 3 [2]); L – номинальный ресурс подшипников, млн. об.; P – эквивалентная нагрузка, Н.
L = Ln·60·nII /106,(2.69)
где Ln – номинальный ресурс в часах (примем Ln=125 ч)
L = 150·60·1800/106=16,2 млн.об.
Эквивалентная нагрузка, Н:
P = R·V·Kδ·KТ , (2.70)
где R – радиальная нагрузка, Н (R = 12959 Н); V – коэффициент вращения (V=1,[2] стр. 359) Kδ – коэффициент, учитывающий нагрузки (Kδ =1,35,[2] стр. 362 ); KТ – температурный коэффициент (KТ =1 [2]).
P = 12959·1·1,35·1=17494,65 H.
Срасч.=16,21/3·17494,65=44266,67 H.
Условие (2.67) выполняется. Окончательно принимаем для дебалансного вала шарикоподшипник радиальный сферический двухрядный (по ГОСТ 5720 – 75) [2]:
№ 1608 С=44,9 мм; d=40 мм; D=90 мм; B=33 мм.
2.4.2 Расчёт ведущего вала вибровозбудителя
Выполним эскизную компоновку элементов вала (рисунок 2.11, а).
На вал действуют две силы в двух плоскостях: Fr в плоскости y0z и Ft в плоскости x0z и действует крутящий момент T (рисунок 2.11, а, г).
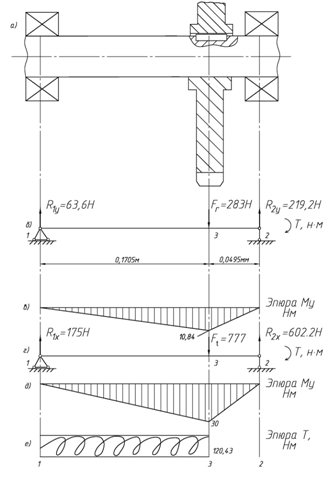
Рисунок 2.11 – Эпюра моментов
Находятся реакции в опорах в плоскости z0y (рисунок 2.11, а):
![]()
![]() ;
;
![]() .
.
![]()
![]() ;
;
![]() .
.
Находится изгибающий момент в точках 1, 2, 3 (рисунок 2.11, в):
![]() .
.
![]() .
.
Находятся реакции в опорах в плоскости z0x (рисунок 2.11, г):
![]()
![]() ;
;
![]() .
.
![]()
![]() ;
;
![]() .
.
Находится изгибающий момент в точках 1, 2, 3 (рисунок 2.11, д):
![]() ;
;
![]() .
.
Максимальный момент приложен в точке 3 под зубчатым колесом:
![]() ;(2.71)
;(2.71)
![]() .
.
Приведённый момент по формуле (2.64):
![]() .
.
Тогда наименьший диаметр вала равен по формуле (2.66):
![]() .
.
Конструктивно принимаем диаметр ведущего вала вибровозбудителя d=0,04м.
2.4.2.1 Выбор подшипников
По ГОСТ 5720 – 75 выбран радиальный сферический двухрядный шарикоподшипник [2]:
№1208 C = 19кН; d = 40 мм; D = 80 мм; B = 18 мм.
Проверяют его на динамическую грузоподъёмность по условию (2.67).
Эквивалентная нагрузка по формуле (2.70):
![]() .
.
Срасч.=16,21/3·865,15=2189 H < Стаб.
Условие (2.67) выполняется – подшипник выбран верно.
2.5 Расчёт и выбор шпонки
Размеры призматических шпонок (рисунок 2.12): ширина b, высота h, глубина паза t1 и ступицы t2 выбираем в зависимости от диаметра вала.
Длину шпонки принимаем из стандартного ряда на 5 – 10 мм меньше длины ступицы.
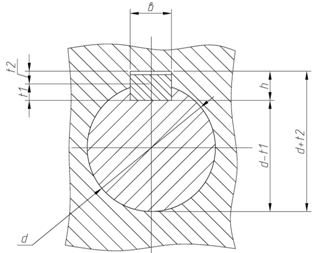
Рисунок 2.12-Призматическая шпонка
Выбранную шпонку проверяют на смятие:
![]() ;(2.72)
;(2.72)
где ![]() - допускаемое напряжение смятия,
МПа, для H7/h6
- допускаемое напряжение смятия,
МПа, для H7/h6 ![]() = 80 … 120 МПа) ;
= 80 … 120 МПа) ; ![]() - расчётная
длина шпонки, мм (lp=l
– b).
- расчётная
длина шпонки, мм (lp=l
– b).
Результаты расчётов сведём в таблицу 2.2.
Таблица 2.2 - Результаты расчетов
| № вала | 1 (ведущий) | 2 (вал-шестер.) | 2 (вал-дебал.) |
|
Т, Н |
120,43 | 97,125 | 97,125 |
| d, мм | 40 | 40 | 40 |
| в, мм | 12 | 12 | 12 |
| h, мм | 8 | 8 | 8 |
| t1, мм | 5 | 5 | 5 |
| t2, мм | 3,3 | 3,3 | 3,3 |
| l, мм | 36 | 36 | 80 |
| lр, мм | 24 | 24 | 68 |
|
|
76 | 61,3 | 21,6 |
|
|
80 | 80 | 80 |
Прочность по условию (2.72) достаточна.
Шпонка призматическая (по ГОСТ 23360-78) [2].
Для соединения вал-зубчатое колесо: Шпонка 12x8x36 ГОСТ 23360-78.
Для соединения вал-шестерня: Шпонка 12x8x36 ГОСТ 23360-78.
Для соединения вал-дебаланс: Шпонка 12x8x36 ГОСТ 23360-78.
2.6 Выбор и расчёт подвески виброплиты
Эскизная компоновка виброплиты приведена на (Рисунке 2.13).
Подвеска виброплиты соответствует подвеске уплотнителя откосов, установленного на машине ВПО- 3000. Разница в том, что механизм подъёма и опускания – гидравлический.
Расчёт подвески виброплиты сводится к расчёту и выбору гидроцилиндров и расчёту рессор.
2.6.1 Расчёт и выбор гидроцилиндров
Для определения длины хода поршня Xпор и усилия на штоке Fшт изобразим в масштабе расчётную схему рабочего оборудования (Рисунок 2.15).
Усилие на штоке определим для двух неблагоприятных случаев нахождения виброплиты.
1) Виброплита находится в нижнем положении при подъёме (вертикальная статическая сила прижатия Fвст к балласту (Рисунок 2.15) не действует) (Рисунок 2.14).
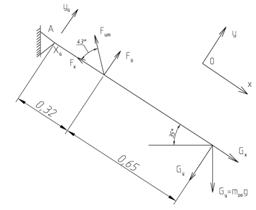
Рисунок 2.14-Схема к определению усилия на штоке
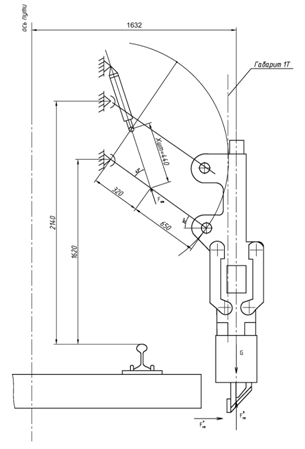
Рисунок 2.15-Расчетная схема к определению длины хода поршня и усилия на шток
![]() :
: ![]() ;
;
![]() , (2.73)
, (2.73)
где ![]() - масса
рабочего оборудования, кг [5].
- масса
рабочего оборудования, кг [5].
![]() ,(2.74)
,(2.74)
где ![]() - приведённая
масса виброплиты, кг (
- приведённая
масса виброплиты, кг (![]() =460 кг);
=460 кг); ![]() - масса рамы, кг (
- масса рамы, кг (![]() =682 кг [5]);
=682 кг [5]); ![]() - масса
установки электродвигателя, кг;
- масса
установки электродвигателя, кг; ![]() - масса элементов присоединения,
кг ( Принято
- масса элементов присоединения,
кг ( Принято ![]() =100кг);
=100кг); ![]() - масса щеки, кг (
- масса щеки, кг (![]() =72 кг [5]).
=72 кг [5]).
![]() ,(2.75)
,(2.75)
где ![]() - масса
электродвигателя, кг (
- масса
электродвигателя, кг (![]() =160кг);
=160кг); ![]() - масса элементов установки, кг
(Принято
- масса элементов установки, кг
(Принято ![]() =70кг).
=70кг).
![]() .
.
Тогда:
![]()
В итоге:
![]() .
.
2) Виброплита находится во взаимодействии с балластом (действует FВТЯГСТ) (Рисунок 2.16).
![]() :
: ![]() ;
;
![]() ,(2.76)
,(2.76)
где ![]() - вертикальная статическая сила
прижатия виброплиты к балласту, Н (Принято
- вертикальная статическая сила
прижатия виброплиты к балласту, Н (Принято ![]() =
=![]() ).
).
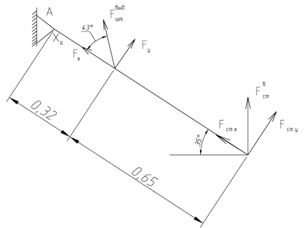
Рисунок 2.16 - Схема к определению усилия на штоке
![]() .
.
Определяем минимально необходимую площадь рабочей поверхности поршня в поршневой полости, м2:
![]() ,(2.77)
,(2.77)
где ![]() - номинальное давление в
гидроцилиндре, Па (
- номинальное давление в
гидроцилиндре, Па (![]() =10 Мпа); 2 – устанавливается два
гидроцилиндра.
=10 Мпа); 2 – устанавливается два
гидроцилиндра.
![]() .
.
Тогда минимально необходимый диаметр поршня для прижатия плиты к балласту найден из формулы:
![]() . (2.78)
. (2.78)
![]() .(2.79)
.(2.79)
![]() .
.
Определяется минимально необходимая площадь рабочей поверхности поршня в итоговой полости при подъёме виброплиты из рабочего положения:
![]() .(2.80)
.(2.80)
![]() .
.
Минимально необходимый диаметр поршня при подъёме определяется из формулы:
![]() ,(2.81)
,(2.81)
где ![]() - диаметр штока.
- диаметр штока.
Учитывая отношение рабочих
площадей ![]() ,
преобразована формула (2.81):
,
преобразована формула (2.81):
![]() ,(2.82)
,(2.82)
Из формулы (2.82):
![]() .(2.83)
.(2.83)
Минимально необходимый диаметр поршня при подъёме (втягивании) равен:
![]() .
.
Выбирается большой диаметр т.е. D=80.7 мм.
При известных Xпор=440 мм, D=80.7 мм и φ=1.65 выбираем два гидроцилиндра [6,стр.90] с: Dп=100 мм, dшт=63 мм, Lход=450 мм.
Габаритные размеры показаны на рисунке 2.17.
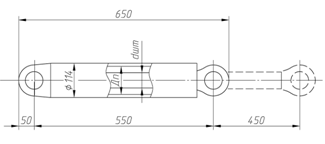
Рисунок 2.17 – Габаритные размеры гидроцилиндра
2.6.2 Расчёт рессорной подвески
На рессорные подвески действует горизонтальная статическая сила сопротивления балласта (Рисунок 2.14) FСТГ и FСТВ.
Определяется изгибная прочность рессор и подбираются сечения bxh.
Изобразим расчётную схему рессорной подвески (Рисунок 2.18).
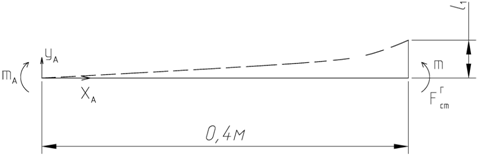
Рисунок 2.18 – Расчетная схема рессорной подвески
![]() , (2.84)
, (2.84)
где ![]() - статическая горизонтальная сила
сопротивления балласта, воспринимаемая одной рессорной подвеской, Н.
- статическая горизонтальная сила
сопротивления балласта, воспринимаемая одной рессорной подвеской, Н.
![]() , (2.85)
, (2.85)
где ![]() - приведённый коэффициент
жёсткости балласта (
- приведённый коэффициент
жёсткости балласта (![]() =
=![]() Н/м (см.п.2.1.3);
Н/м (см.п.2.1.3); ![]() - длина отклона рессоры
от
- длина отклона рессоры
от ![]() (Рисунок
2.18), м (Примем
(Рисунок
2.18), м (Примем ![]() =0.1м).
=0.1м).
![]()
![]()
![]() ,(2.86)
,(2.86)
где ![]() - изгибающий момент, действующий
на рессорную подвеску от
- изгибающий момент, действующий
на рессорную подвеску от ![]() ,
, ![]() .
.
Страницы: 1, 2, 3, 4, 5, 6, 7, 8
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |