 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Дипломная работа: Разработка оборудования для уплотнения балластной призмы
где BМ – максимально допустимый вылет исполнительных органов в сторону междупутья, м (BМ=2,050 м); Lшп – длина шпалы, м (Lшп=2,75); вК – вылет клина относительно корпуса плиты, м (вk = - 0,085 м); δ – заход клина под торцы шпал, м (δ= - 0,17 м).
![]() .
.
Конструктивно принято Bк = 0,35 м.
В процессе разработки возбудителя колебаний размеры корректируются.
При транспортировке машины плита не должна выходить за приделы габаритов подвижного состава.
Эскизная компоновка корпуса виброплиты показана на рисунке 2.3.
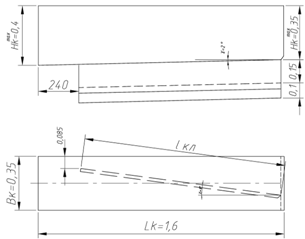
Рисунок 2.3 - Эскизная компоновка корпуса виброплиты
2.1.3 Разработка возбудителя колебаний
Для дебалансного возбудителя рассчитывается требуемая вынуждающая сила FВ и, соответственно, конструкция дебалансов, обеспечивающих колебания виброплиты, с заданной амплитудой.
При вращении дебалансов с угловой частотой ω и амплитудой Sa суммарная вынуждающая сила составит:
![]() , (2.10)
, (2.10)
где mn – приведенная масса колеблющихся элементов, кг; ωo – частота свободных колебаний плиты с учётом жёсткости балласта, с-1; h – коэффициент демпфирования, с-1.
Находим mn:
mn = an ·m, (2.11)
где m –масса корпуса плиты с вибровозбудтелем, кг (m = 400 кг); aп – коэффициент приведения (aп=1,15 [1]).
mn = 1,15·400=460 кг.
Находим ωo:
 ,(2.12)
,(2.12)
где Cр – приведенный коэффициент жёсткости рессорной подвески (принят Cр = 1·106 Н/м); Cб – приведенный коэффициент жёсткости балласта, Н/м.
Cб = Cуд ·Z ·a · l , (2.13)
где Z – заглубление под шпалу, м (Z=0,1 м); a – толщина клина, м (a=0,1 м); l – длина клина, м (l=1,35 м); Cуд – удельный коэффициент жёсткости балласта, Н/м4 , принимается по графику, при:
![]() (Cуд=
3·107 Н/м4 [1]).
(Cуд=
3·107 Н/м4 [1]).
Cб = 3·107 ·0,1·0,1·1,35 = 40,5 ·104 Н/м .
Тогда:
![]() .
.
Далее находится h:
![]() , (2.14)
, (2.14)
где bб , bр – соответственно коэффициент сопротивлений балласта и рессор, Н·с/м (принят bр = 5·103 Н·с/м [1]).
bб = bуд·Z ·a · l, (2.15)
где bуд – удельный коэффициент вязкостных сопротивлений, Н·с/м4, принимается по графику [1], при :
![]() bуд
= 12 · 104 Н·с/м4.
bуд
= 12 · 104 Н·с/м4.
bб = 12·104·0,1·0,1·1,35 = 1,62·103 Н·с/м .
Тогда:
![]() .
.
В итоге по формуле (2.10) получили:
![]() .
.
Принята FВ = 90 кН.
По найденной FВ и принятой компоновке вибровозбудителя найдём вынуждающую силу одного дебаланса FВ’:
FВ’ = FВ / n,(2.16)
где n – принятое число дебалансов (n=4).
FВ’ = 90 / 4 = 22,5 кН .
Предварительно назначается расчётная длина вала дебаланса (рисунок 2.4) равная lв = 0,22.
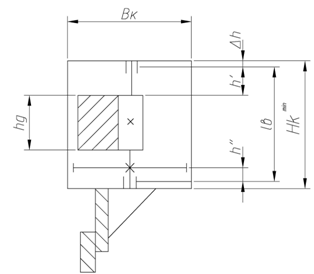
Рисунок 2.4 – Схема дебаланса
Для нахождения диаметра вала строится эпюра изгибающего момента. Для этого находятся реакции в точках опоры (рисунок 2.5)
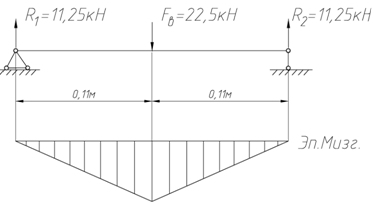
Рисунок 2.5 –Эпюра изгибающего момента
Максимальный изгибающий момент равен:
Mmax = R1 · 0,11 =11,25 · 0,11 =1,24 кН · м .
Прочность вала:
![]() ,(2.17)
,(2.17)
где W –
момент сопротивления при изгибе, м3 ; (для круглого сечения ![]() ); [σ] –
допускаемое напряжение, МПа .
); [σ] –
допускаемое напряжение, МПа .
![]() ,(2.18)
,(2.18)
где σFlim – предел длительной выносливости, МПа; SF – коэффициент безопасности (для Ст 45 - SF = 1,75 , [2] стр. 90).
Для стали 45 :
σFlim =1,8 НВ,(2.19)
где НВ – твёрдость стали (для стали 45 HB = 248,5 , источник [2] стр.426).
Допускаемое напряжение равно:
[σ] = (1,8·248,5)/1,75 =255,6 МПа.
Находится диаметр вала по формуле:
![]() ;(2.20)
;(2.20)
![]() .
.
Принят d = 40 мм ([2] стр. 296)
2.1.3.1 Компоновка дебалансов
Неуравновешенные части дебалансов в сечении имеют форму кругового сектора. Значение r0 (расстояние от оси вращения до центра тяжести дебаланса) зависит от угла сектора φ0 внешнего Rв и внутреннего rв радиусов дебаланса (рисунок 2.6).
Угол φ0 по рекомендациям [1] назначается 120˚. Радиус Rв предварительно определяется выражением:
Rв = 0,5· ВК – δД – bК, (2.21)
где δД – зазор между дебалансом и стенкой корпуса, м (δД = 0,045 м); bК – толщина корпуса виброплиты, м (bК = 0,01 м).
Rв = 0,5·0,35 – 0,02 – 0,01 = 0,12 м.
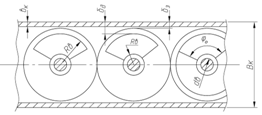
Рисунок 2.6 – Схема компоновки дебалансов
Расстояние от оси вращения до центра тяжести дебаланса:
 .(2.22)
.(2.22)
Внутренний радиус дебаланса:
![]() ,(2.23)
,(2.23)
где δст – ширина ступицы, м (принимается конструктивно δст=0,02 м)
![]() .
.
Тогда
 .
.
При требуемых силе Fв’ , частоте ω и установленном r0 определяется масса неуравновешенной части дебаланса:
![]() ;(2.24)
;(2.24)
![]() .
.
Площадь дебаланса, м2 :
![]() ;(2.25)
;(2.25)
![]() .
.
Длина дебаланса, м:
![]() ,(2.26)
,(2.26)
где ρ – плотность металла, кг/м3 (ρ =7800 кг/м3).
![]() .
.
2.2 Мощность, необходимая при виброобжатии балласта
Затраты мощности при виброподбивке шпал представлены в виде:
Рв = Рб + Pвс, (2.27)
где Рб – средняя мощность, необходимая для преодоления сопротивлений колебаниям виброплиты от балласта и рессорной подвески, Вт; Pвс – мощность, необходимая для преодоления внутренних сопротивлений вибровозбудителя, Вт.
![]() ,(2.28)
,(2.28)
где φ - фаза вынужденных колебаний по отношению к фазе возмущающей силы, град; Fв – максимальная вынуждающая сила, Н (Fв=90·103Н).
![]() ,(2.29)
,(2.29)
где h – коэффициент демпфирования, с-1 (h = 7,2 с-1); ω0 – частота свободных колебаний плиты с учётом жёсткости балласта, с-1 (ω0=55,26 с-1).
![]()
По формуле (2.28) находится:
![]() .
.
Мощность ![]() находится
по формуле:
находится
по формуле:
![]() ,(2.30)
,(2.30)
где P0 – мощность, необходимая для преодоления диссипативных сопротивлений вращению, Вт.
Р0 =0,5·Fв · dв·ω ·fn, (2.31)
где fn – приведённый коэффицент трения в подшипниках дебелансного вала, fn = 0,001 ( [3] стр.148).
P0 = 0,5·90 ·103·0,04 ·188,4·0,001 = 339,12 Вт
Находится PВМ :
PВМ = 0,02 · P0 , (2.32)
PВМ = 0,02 · 339,12 = 6,7 Вт
Находим Р33 по формуле:
![]() ,(2.33)
,(2.33)
где ηз – КПД зубчатой передачи синхронизатора (ηз = 0,96 – [2] стр. 23); m – количество зубчатых зацеплений (m=4).
Pзз= (4246 +339,12) · (1 – 0,964) = 690,7 Вт.
Тогда:
Pвс’ = 339,12 + 6,7 + 690,7 = 1036,8 Вт.
В итоге суммарные затраты мощности равны:
Pв = 1036,6 + 4246 = 5282,3 Вт.
В некоторые моменты работы виброплиты могут возникнуть ситуации, такие как совпадение фазы вынужденных колебаний с фазой возмущающей силы.
Максимально возможные значения Рб возможно при sin2 φ0 =1:
![]() .
.
Максимально возможные потери мощности в зубчатом зацеплении:
P33max = (25570+339,12)(1-0,964) = 3801,1 Вт.
Тогда мощность PВС’ max:
PВС’ max = 339,12 + 6,7 + 3801,1 = 4146,9 Вт.
В итоге максимально возможная мощность, затрачиваемая на виброподбивку шпал равна:
Pв max = 25570 + 4146,9 = 29716,9 Вт.
Для того чтобы учесть возрастание сопротивления на виброподбивку шпал, при попадании плиты в резонанс, при выборе двигателя возьмём среднее значение мощности Pв ср:
Pв ср = (5282,6 +29716,9)/2 =17499,7 Вт ≈17,5 кВт.
Потребная мощность двигателя вибровозбудителя подбивочной плиты, кВт:
Pв ср = Pв ср / ηn,(2.34)
где ηn – КПД передачи от двигателя до ведущего вала вибровозбудителя (ηn = 0,98).
Pдв = 17,5/0,98 =17,85 кВт.
Выбирается асинхронный двигатель с фазным ротором ([2] стр.27) таблица 2.1:
Таблица 2.1 – Характеристики асинхронного двигателя 4А160М2У3
| Типоразмер | Мощность PH, кВт | Синхр. частота вращения, об/мин | Скольжение, % | nH, oб/мин | Тmax/ Тном |
| 4А160М2У3 | 18,5 | 1500 | 2,2 | 1467 | 1,4 |
Находится крутящий момент на валу двигателя, H·м:
Тmax = 9550 · PH / nH ;(2.35)
Тmax = 9550 · 18,5/ 1467= 120,43 H·м.
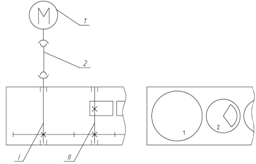
Учитывая разность частоты вращения валов дебалансов и частоты вращения вала двигателя устанавливается дополнительный вал с зубчатым колесом повышающим частоту вращения вала дебаланса (рисунок 2.7).
Для передачи крутящего момента от вала двигателя к ведущему валу дебалансов устанавливается карданный вал от ГАЗ – 53 [8], который рассчитан на Pmax = 84,6 кВт ; Тmax = 284,4 H·м ; n = 2000 об/мин.

1 – двигатель; 2 – карданный вал; 3 – ускоряющее зубчатое колесо; 4 – дебаланс; 5 – синхронизирующие зубчатые шестерни.
Рисунок 2.7 – Привод виброплиты
2.3 Расчёт цилиндрической зубчатой передачи внешнего зацепления
Исходные данные:
Максимальный крутящий момент на тихоходном валу Тmax I = 120,43 H·м
Частота вращения ведущего (ведомого) вала nII = 1800 об/мин
Частота вращения ведомого (ведущего) вала nI = 1467 об/мин
Материал шестерни ст 40Х У
Материал колесаст 40Х ТВ4
Передаточное отношение:
u21 = nII / nI =1800/1467 =1,22.
I – тихоходный вал; 1 – зубчатое колесо; II – быстроходный вал; 2 – шестерня.
Рисунок 2.8 – Зубчатая передача внешнего зацепления
Расчёт произведён на ЭВМ (программа ДМ – 1).
2.3.1 Алгоритм расчёта зубчатой передачи (силовой расчёт).
1) Определяется по контактным напряжениям межосевое расстояние aW в мм по формуле :
 , (2.35)
, (2.35)
где u – передаточное число рассчитываемой передачи (u = 1,22); K1 – вспомогательный численный коэффициент (K1 = 315 [2]); [σH] – допускаемое контактное напряжение, МПа; Т1 – крутящий момент на валу колеса, H·мм; KНα – коэффициент распределения нагрузки (KНα = 1 [2]); KНβ – коэффициент концентрации нагрузки ( [2] ст 92) ;KНV – коэффициент динамичности [2]; KНД – коэффициент долговечности лимитирующего колеса [2]; Ψa – коэффициент ширины венца, принимается из единого ряда [2 стр. 52] (Ψa = 0,2 …0,4); KХ – коэффициент, учитывающий смещение.
2) Ширина колеса в мм:
b2 = Ψa· aW.(2.36)
3) Модуль зацепления m в мм из расчёта на изгиб ориентировочно определяется по формуле:
![]() ,(2.37)
,(2.37)
где K2 – численный коэффициент (для прямозубых колёс K2 = 5); KFα , KFβ , KFv ,KFД – коэффициенты, аналогичные KНα , KНβ , KНV , KНД определяются по [2]; [σF] – допускаемое изгибное напряжение лимитирующего колеса, МПа ([2] стр. 91).
4) Расчёты по формулам (2.35)…(2.36) составляют программу ДМ – 1. Машина выдаёт на печать исходные данные и величины aW ,b2 и m в миллиметрах. Полученные данные подлежат обработке.
Значения aW и b2 выбираются из единого ряда ([2], ст 51). Допускается их округление по ГОСТ 6636 – 69 ([2] ст 296). Модуль округляется в большую сторону.
2.3.2 Алгоритм геометрического и проверочного расчёта зубчатой передачи
Определение чисел зубьев:
1) Суммарное число зубьев ZΣ:
ZΣ = 2·aW· cos β / m ,(2.38)
где β – угол наклона линии зуба.
Величина ZΣ округляется до ближайшего целого числа.
2) Число зубьев шестерни Z1 :
Z1 = ZΣ / (u + 1).(2.39)
3) Число зубьев колеса Z2:
Z2 = ZΣ – Z1.(2.40)
4) Окружная скорость колёс v, м/с:
![]() .(2.41)
.(2.41)
5) Уточнённое передаточное число u 21:
u 21 = Z2 /Z1.(2.42)
6) Ширина шестерни b2, мм:
b2 = 1,1 b2.(2.43)
7) Межосевое расстояние, мм:
aW = 0,5·m(Z1 + Z2) + (Х1 + X2 – Δy)m ,(2.44)
где Х1 , X2 – коэффициенты смещения (Х1 = X2=0 [2]); Δy – коэффициент уравнительного смещения (Δy = 0 [2]).
8) Угол наклона линии зуба для прямозубых колёс β = 0.
9) Делительные диаметры d, мм:
d = m · z / cos β.(2.45)
10) Диаметр вершин d a, мм:
d a = d + (2 + 2x– 2Δy)m.(2.46)
11) Диаметр впадин d f , мм:
d f = d – (2,5 – 2x)m.(2.47)
12) Окружная толщина зубьев по делительной окружности St, мм:
St = (π/(2cos β) + 2x·tgα)m.(2.48)
13) Угол зацепления αW:
![]() ,(2.49)
,(2.49)
где α – угол профиля (α = 20˚).
14) Торцевой коэффициент перекрытия εα:
![]() .(2.50)
.(2.50)
15) Коэффициент суммарной длины контактных линий Zε:
![]() .(2.51)
.(2.51)
16) Угол наклона линии зуба по основной окружности βв:
![]() .(2.52)
.(2.52)
17) Коэффициенты формы сопряжённых поверхностей зубьев в полосе зацепления Zн:
 .(2.53)
.(2.53)
18) Рабочее контактное напряжение σн, мПа:
 ,(2.53)
,(2.53)
где ![]() - коэффициент, учитывающий
механические свойства материалов сопрягаемых поверхностей (
- коэффициент, учитывающий
механические свойства материалов сопрягаемых поверхностей (![]() = 275) [14].
= 275) [14].
19) Отклонение рабочего контактного напряжения от допускаемого ∆σн, %:
![]() .(2.54)
.(2.54)
20) Окружное усилие Ft, H:
![]() ,(2.55)
,(2.55)
где ![]() - начальный диаметр колеса, мм.
- начальный диаметр колеса, мм.
![]() ,(2.56)
,(2.56)
где ![]() - начальный диаметр шестерни, мм.
- начальный диаметр шестерни, мм.
![]() .(2.57)
.(2.57)
21) Радиальное усилие Fy, H:
![]() . (2.58)
. (2.58)
22) Осевое усилие Fa, H:
![]() .(2.59)
.(2.59)
23) Коэффициент перекрытия зубьев Yε :
Yε=1.
24) Коэффициент наклона зубьев Yβ :
Yβ=1.
25) Рабочее изгибное напряжение зубьев шестерни σF2, мПа:
![]() .(2.60)
.(2.60)
26) Рабочее изгибное напряжение колеса σF1, мПа:
![]() .(2.61)
.(2.61)
27) Максимальное контактное напряжение σн max, мПа:
 .(2.62)
.(2.62)
28) Максимальное изгибное напряжение σF max, мПа:
![]() .(2.63)
.(2.63)
Значения рассчитываемых величин представлены на распечатках результатов расчёта, сделанного на ЭBM (программа ДМ-1).
2.3.3 Результаты расчёта зубчатой передачи, выданные ЭВМ
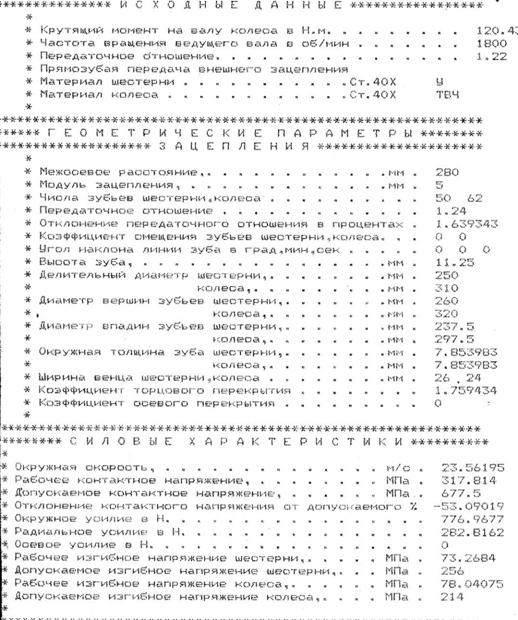
2.3.4 Анализ результатов расчёта зубчатой передачи
Геометрические параметры округляем до сотых долей миллиметра.
По допускаемым и рабочим напряжениям делаем вывод, что прочность достаточна.
Усилие в зацеплении округляем с точностью до целых.
2.4 Уточнённый расчёт валов и выбор подшипников
Данный расчёт даёт более достоверные результаты, чем ориентировочный расчёт.
В этом разделе исходными данными являются: силы, действующие на колесо шестерни, расстояния между линиями действия всех сил, диаметры колёс.
Для наглядного представления изобразим аксонометрическую схему нагружения валов (рисунок 2.9).
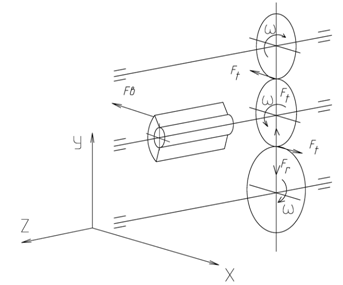
Рисунок 2.9 – Схема нагружения валов
2.4.1 Расчёт дебалансного вала
Для уточнённого расчёта выполним эскизную компоновку элементов вала (рисунок 2.10).
Предварительно назначаем подшипник по ГОСТ 5720 – 75: № 1608 с d=40 мм, D =90 мм, B =33 мм [2].
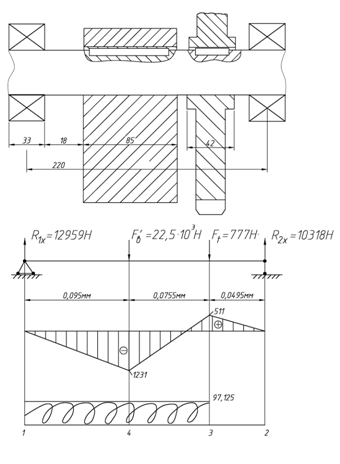
Рисунок 2.10 – Эскизная компановка элементов вала
На вал действуют две силы в направлении X (рисунок 2.10, б) F’в , Ft и крутящий момент T.
Составим уравнения суммы моментов относительно точек 1 и 2, найдём реакции в этих точках.
ΣM1=0![]() ;
;
![]() .
.
ΣM2=0![]() ;
;
![]() .
.
Находим изгибающий момент в т. 1, 2, 3 ,4 (Рисунок 2.10, в):
![]() ;
;
![]() ;
;
Страницы: 1, 2, 3, 4, 5, 6, 7, 8
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |