 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Дипломная работа: Реконструкция горизонтально-расточного станка повышенной жесткости
![]() (58)
(58)
где
CDOF – коэффициент демпфирования по соответствующей линейной (угловой) координате, Н×с/м (Н×м×с/рад);
DOF – индекс, характеризующий степень свободы в рассматриваемом узле;
j – номер строки;
k – номер столбца;
 – индекс узла
– индекс узла
Матрицы [Me], [Ke], {u} и {F} идентичны матрицам, используемым при статическом анализе.
По аналогии со статическим анализом уравнение равновесия для модели, состоящей n элементов, используемое при динамическом анализе, принимает вид:
![]() (59)
(59)
где [Mg] – глобальная матрица масс модели;
![]() – глобальный
вектор узловых ускорений;
– глобальный
вектор узловых ускорений;
[Cg] – глобальная матрица коэффициентов демпфирования;
![]() – глобальный
вектор узловых скоростей.
– глобальный
вектор узловых скоростей.
Глобальная матрица масс [Mg] формируется путем последовательного суммирования соответствующих коэффициентов в элементных матрицах, то есть:
![]() (60)
(60)
Матрицы [Kg], ![]() ,
, ![]() и
и ![]() формируются также как и в
случае статического анализа модели. Глобальная матрица коэффициентов
демпфирования получается аналогично и имеет вид:
формируются также как и в
случае статического анализа модели. Глобальная матрица коэффициентов
демпфирования получается аналогично и имеет вид:
 (61)
(61)
При динамическом анализе шпиндельного узла наибольший интерес представляют его частотные характеристики, определяемые при изменении входной координаты во времени по закону гармонических колебаний. Частота этих колебаний изменяется теоретически от нуля до бесконечности, а практически – в пределах некоторого диапазона частот, который называют рабочим. Для рассматриваемой модели входной координатой является сила или момент силы. Поэтому глобальный вектор узловых нагрузок принимает следующую форму:
![]() (62)
(62)
или
где Fmax – амплитудное значение силы (момента), Н (Н×м);
е – основание натуральных логарифмов;
![]() – мнимая
единица;
– мнимая
единица;
y – сдвиг силы по фазе, рад;
w – угловая скорость, рад/с;
t – время, с;
{F1} и {F2} – вещественная и мнимая часть вектора нагрузки,
определяемые по формулам:
![]() (64)
(64)
![]() (65)
(65)
При изменении входной координаты по гармоническому закону выходная координата (перемещение) также будет изменяться гармонически. Таким образом, глобальный вектор узловых перемещений должен быть представлен в следующем виде:
![]() (66)
(66)
или
где {umax} – амплитудное значение линейного (углового) перемещения, м (рад);
j – сдвиг перемещения по фазе, рад;
{u1} и {u2} – вещественная и мнимая часть вектора перемещений, определяемые по формулам:
![]() (68)
(68)
![]() (69)
(69)
После подстановки выражений (3.61) и (3.60) в формулу (2.51) уравнение равновесия динамической модели шпиндельного узла принимает вид:
![]() (70)
(70)
Решение полученного уравнения относительно неизвестных узловых перемещений имеет следующий вид:
![]() (71)
(71)
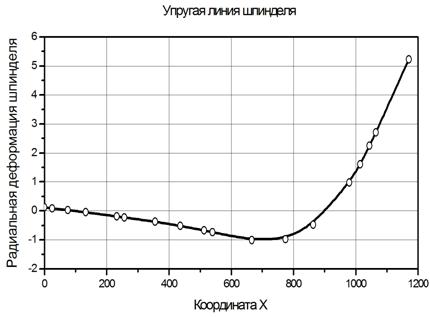
Рисунок 27 – Упругая линия шпинделя
4. Проектирование стойки станка
4.1 Компоновка стойки
В связи с тем, что задачей данного дипломного проекта является реконструкция горизонтально-расточного станка повышенной жесткости, одной из основных задач является проектирование шпиндельной бабки с более высокими динамическими и статическими характеристиками.
Изучив конструкцию базового станка и рассмотрев все возможные варианты ее реконструкции, была рассчитана и спроектирована стойка с улучшенными характеристиками, по сравнению с базовым вариантом.
При проектировании новой стойки были учтены и по возможности использованы все достижения современной науки. В частности внутренняя часть стойки имеет сотовую конструкцию. Такая конструкция позволяет снизить массу примерно на 1\3 часть, но при этом повысить жесткосные и теплодеформационные характеристики стойки.
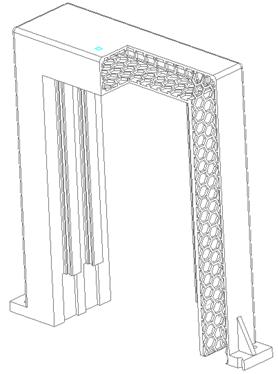
Рисунок 29 – Стойка реконструированного станка с вырезом
Стойка крепится к станине с помощью прямоугольных направляющих, которые могут располагаться горизонтально и вертикально. Также к стойке крепятся направляющие для вертикального перемещения шпиндельной бабки. Стойка также крепится к фундаменту при помощи фундаментных болтов.
4.2 Расчет направляющих
Методика расчета направляющих состоит из следующих этапов:
а) определение суммарных давлений, действующих на каждую грань направляющих;
б) определение среднего удельного давления на каждой из этих граней;
в) определение наибольшего удельного давления на них;
г) сопоставление полученных величин с наибольшими допускаемыми значениями удельных давлений;
Давления на грани направляющих А,Б,С находят из условий равновесия. Также на стойку действуют составляющие Px, Py, Pz силы резания, собственный вес стойки G.
Удельные давления:
![]() ;
; ![]() ;
; ![]() ; (72)
; (72)
где – L – длина направляющих
а, b, c – значения рабочей ширины граней направляющих

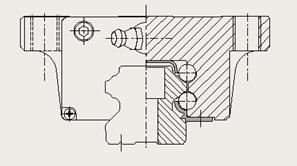
Рисунок– Направляющие качения для шпиндельной бабки
5 Проектирование шпиндельной бабки
5.1 Компоновка шпиндельной бабки
В связи с тем, что бала изменена несущая система и кинематика станка, была спроектирована новая шпиндельная бабка.

Рисунок 31 – Шпиндельная бабка реконструированного станка модели 2А622
Спроектированная шпиндельная бабка обладает повышенной жесткостью по сравнению со старой. Вертикальное перемещение бабки вдоль стойки происходит по линейным направляющим качения с помощью двух ходовых винтов, что обеспечивает повышенную точность обработки деталей.
6 Статический и динамический расчет стойки и шпиндельной бабки
6.1 Статический расчет стойки и шпиндельной бабки
На точность обработки существенное влияние оказывают статические и динамические характеристики основных органов станка, а именно: статическая и динамическая жесткость, частоты и формы собственных колебаний, амплитудно-частотная характеристика (АЧХ), амплитудно-фазовая частотная характеристика (АФЧХ), коэффициенты демпфирования (или декременты затухания).
6.1.1 Статические характеристики
Статическая рассчитывается по формуле:
![]() (73)
(73)
где F - приложенная сила;
d - прогиб.
Существенное влияние на жесткость оказывает длина (высота) органа, поэтому при проектировании всегда необходимо стремиться к ее уменьшению.
Жесткость так же зависит от межопорного расстояния b.
6.1.2 Динамические характеристики стойки и шпиндельной бабки
На точность работы станка оказывают влияние и динамические характеристики несущей системы, которые являясь показателями динамического качества, достаточно точно определяют амплитуды колебаний.
Формы колебаний и их анализ позволяют наглядно представить характер деформирования основных элементов несущей системы. Формы колебаний также дают представление о размере колебаний по всей длине (высоте) органа, что важно для правильного конструирования станка.
5. Расчет экономического эффекта от реконструкции горизонтально-расточного станка мод. 2А622
Проведенная реконструкция горизонтально-расточного станка мод. 2А622 позволила повысить его производительность и качество изготовляемых деталей. Рассчитаем годовой экономический эффект от реконструкции выбрав за базу для сравнения горизонтально-расточной станок мод. 2А622. Исходные данные представлены в таблице 5.1.
Таблица 5.1 – Исходные данные для расчета годового экономического эффекта от реконструкции
| № п/п | Показатели | Усл. обозн. | Ед. изм. | Базовый вариант (1) |
Новый вариант (2) |
| 1 | 2 | 3 | 4 | 5 | 6 |
| 1 | Годовая программа |
N год |
шт/год | 1600 | 1600 |
| 2 | Штучное время |
t шт |
мин/шт | 1,34 | 1,04 |
| 3 |
Режим работы: - количество рабочих дней в неделю, - число смен - продолжительность смены |
h дн рабнед h смен F смен |
дни - час |
5 1 8 |
5 1 8 |
| 4 | Стоимость единицы оборудования |
Ц об |
руб | 530000 | 600000 |
| 5 | Площадь, занимаемая единицей оборудования |
S об |
м2 |
3 | 3 |
| 6 | Часовая тарифная ставка рабочего |
С зч |
руб/час | 5,90 | 5,90 |
| 7 | Коэффициент, учитывающий дополнительную заработную плату |
К дз |
- | 1,2 | 1,2 |
| 8 | Коэффициент, учитывающий единый социальный налог |
К сн |
- | 1,262 | 1,262 |
| 9 | Районный коэффициент |
К урал |
- | 1,15 | 1,15 |
Страницы: 1, 2, 3, 4, 5, 6, 7, 8
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |