 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Теория механизмов и машин
Расхождение результатов не превышает 5%
Превышение 5% в расхождении значений ускорений точки В объясняется погрешностью при выполнении графического дифференцирования.
2 Кинематический анализ кулачкового механизма
2.1 Построение плана положений
Задан кулачковый механизм (рис. 2.1) с размерами:
1.
Радиус ![]() 24
24
2.
Радиус ![]() 36
36
3.
Радиус ![]() 24
24
4.
Расстояние ![]() 12
12
5.
Длина ![]() 80
80
6.
Расстояние ![]() 100
100
7.
Угловая скорость ![]() 10
10
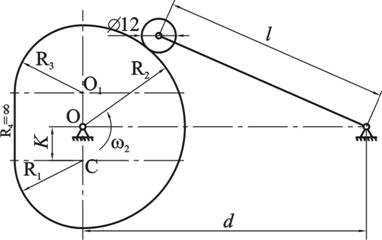
Рис. 2.1 Кинематическая схема кулачкового механизма
В соответствии с исходными данными строим в масштабе кулачек,
масштабный коэффициент при этом выбираем ![]() .
.
Задача анализа кулачкового механизма сводится к определению положений толкателя в зависимости от положения кулачка и установлению скоростей и ускорений толкателя. Для кулачкового механизма с вращательным движением толкателя, снабженным роликом, задача об определении положения и перемещения толкателя решается следующим образом.
Центр вращения ролика всегда находится от действительного
профиля кулачка на расстоянии, равном радиусу ролика ![]() . Геометрическое место точек,
через которые будет проходить центр вращения ролика, образует собой центровой
профиль кулачка. Для определения положения толкателя применяем метод обращения,
т.е. кулачек оставляем неподвижным, а толкатель вместе со стойкой поворачиваем
на заданный угол
. Геометрическое место точек,
через которые будет проходить центр вращения ролика, образует собой центровой
профиль кулачка. Для определения положения толкателя применяем метод обращения,
т.е. кулачек оставляем неподвижным, а толкатель вместе со стойкой поворачиваем
на заданный угол ![]() относительно оси вращения кулачка
в направлении, противоположном его вращению. Радиусом
относительно оси вращения кулачка
в направлении, противоположном его вращению. Радиусом ![]() из центра вращения кулачка
проводим окружность – геометрическое место точек положений центра вращения
толкателя. Для определения положения центра вращения толкателя для нулевого
положения, на центровом профиле берем точку наиболее приближенную к оси кулачка
и радиусом
из центра вращения кулачка
проводим окружность – геометрическое место точек положений центра вращения
толкателя. Для определения положения центра вращения толкателя для нулевого
положения, на центровом профиле берем точку наиболее приближенную к оси кулачка
и радиусом ![]() проводим
еще одну окружность. на пересечении получаем центр вращения толкателя для
нулевого положения (точка 0). Окружность радиусом
проводим
еще одну окружность. на пересечении получаем центр вращения толкателя для
нулевого положения (точка 0). Окружность радиусом ![]() от точки 0 делим на равные части
по 15 градусов, получая точки 1, 3, 4, 5, 6, 7….. Проводим из этих точек
окружности радиусом
от точки 0 делим на равные части
по 15 градусов, получая точки 1, 3, 4, 5, 6, 7….. Проводим из этих точек
окружности радиусом ![]() . Они будут пересекать центровой
профиль кулачка в точках, в которых будет находиться центр ролика толкателя для
соответствующих положений. Измеряем углы между отрезками длиной
. Они будут пересекать центровой
профиль кулачка в точках, в которых будет находиться центр ролика толкателя для
соответствующих положений. Измеряем углы между отрезками длиной ![]() и
и ![]() получаем углы
получаем углы ![]() ,
, ![]() и т. д.
и т. д.
Дополнительно берем точки 2, 8, 9, 14, соответствующие
моменту перехода ролика от одного участка кулачка к другому (Под участком
понимаем часть профиля кулачка с одинаковым законом изменения профиля). Угловое
перемещение толкателя буде определять как разность углов произвольного ![]() и начального
и начального ![]() положения:
положения:
![]()
Линейное перемещение ролика будет пропорционально угловому перемещению:
![]()
2.2 Построение диаграммы перемещений толкателя
Диаграмма перемещений толкателя строится следующим образом.
Строим систему координат. По оси ординат откладываем
перемещения толкателя. По оси абсцисс будем откладывать угловое перемещение
кулачка, масштабный коэффициент равен ![]() .
.
Масштабный коэффициент перемещения толкателя ![]()
2.3 Построение диаграмм скорости и ускорения толкателя.
Диаграмма скорости толкателя строится путем графического дифференцирования диаграммы перемещения методом хорд. Масштабный коэффициент диаграммы скорости толкателя:
![]()
где ![]() - отрезок, соответствующий
полному обороту кулачка
- отрезок, соответствующий
полному обороту кулачка
![]() - полюсное расстояние диаграммы
скорости.
- полюсное расстояние диаграммы
скорости.
Диаграмма ускорения строится методом графического дифференцирования диаграммы скорости. Масштабный коэффициент диаграммы ускорения равен
![]()
Для получения величины скорости необходимо ординату диаграммы скорости умножить на масштабный коэффициент. Для получения величины ускорения толкателя необходимо ординату диаграммы ускорения умножить на масштабный коэффициент.
2.4 Построение диаграммы изменения угла давления.
Угол давления – это угол между вектором скорости толкателя и нормалью к точке касания толкателя и кулачка. Для каждого положения кулачка измеряем угол давления и строим зависимость угла давления от угла поворота кулачка. Масштабный коэффициент
![]()
3 Кинематический анализ сложного зубчатого механизма
3.1 Выходные данные
Задана схема сложного зубчатого механизма, показанная на рисунке 3.1, для которой в таблице 3.1 представлены выходные данные: число зубьев, модуль зацепления, угловая скорость колеса 1 и радиусы колес, вычисленные по формуле:
![]() ,
,
где ![]() - количество зубьев колес (табл.
3.1);
- количество зубьев колес (табл.
3.1);
![]() - модуль зуба колеса (табл. 3.1).
- модуль зуба колеса (табл. 3.1).
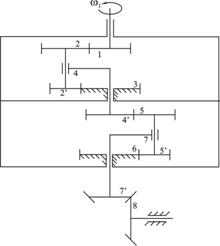
Рис. 3.1
Определим незаданные размеры колес и водил
![]()
![]()
![]()
![]()
Таблица 3.1
| № колеса |
Число зубьев, |
Модуль зуба |
Угловая скорость колеса 1 |
Радиус колеса, |
| 1 | 17 | 3 | 3 | 25,5 |
| 2 | 34 | 51 | ||
| 2’ | 16 | 24 | ||
| 3 | 35 | 52,5 | ||
| 4 | 76,5 | |||
| 4’ | 25 | 37,5 | ||
| 5 | 30 | 45 | ||
| 5’ | 20 | 30 | ||
| 6 | 35 | 52,5 | ||
| 7 | 82,5 | |||
| 7’ | 30 | 45 | ||
| 8 | 36 | 54 |
Изображаем схему механизма в масштабе ![]()
3.2 Кинематический анализ сложного зубчатого механизма, выполненный аналитическим способом
Схема зубчатого редуктора состоит из нескольких ступеней – двух планетарных редукторов Давида и пары с неподвижными осями. Передаточное отношение первого планетарного механизма Давида определяем от колеса 1 до водила 4.
![]()
где ![]() - передаточное отношение от 1
колеса к колесу 3 при неподвижном водиле 4.
- передаточное отношение от 1
колеса к колесу 3 при неподвижном водиле 4.
Передаточное отношение второго планетарного механизма Давида определяем от колеса 4’ до водила 7.
![]()
Передаточное отношение зубчатой пары 7’ – 8
![]()
Передаточное отношение редуктора
![]()
3.3 Кинематический анализ сложного зубчатого механизма, выполненный графическим способом
Проводим снизу от схемы редуктора горизонтальную прямую.
Вдоль оси ![]() проводим
вертикальную линию до пересечения с горизонтальной прямой. На пересечении
получаем точку
проводим
вертикальную линию до пересечения с горизонтальной прямой. На пересечении
получаем точку ![]() .
.
Проводим из точки А колеса 1 вертикальную линию до
пересечения с горизонтальной прямой. От точки пересечения перпендикулярно
откладываем в масштабе ![]() вектор скорости точки А (
вектор скорости точки А (![]() ):
):
![]()
![]()
Соединяем конец вектора ![]() с точкой
с точкой ![]() , получаем картину распределения
скоростей колеса 1. Для построения картины распределения скоростей для колес 2
и 2’ соединяем конец вектора
, получаем картину распределения
скоростей колеса 1. Для построения картины распределения скоростей для колес 2
и 2’ соединяем конец вектора ![]() с точкой
с точкой ![]() . Для нахождения скорости точки
. Для нахождения скорости точки ![]() , на уровне
точки восстанавливаем перпендикуляр к горизонтальной прямой до пересечения с
прямой
, на уровне
точки восстанавливаем перпендикуляр к горизонтальной прямой до пересечения с
прямой ![]() .
Величина перпендикуляра в масштабе дает нам модуль скорости.
.
Величина перпендикуляра в масштабе дает нам модуль скорости.
Аналогично определяем законы распределения скоростей для остальных колес.
Для построения плана угловых скоростей проведем две линии:
горизонталь и вертикаль. На вертикальной линии отложим масштабе значение
угловой скорости первого колеса ![]() (точка 1). Из точки 1 проводим
прямую, параллельную линии
(точка 1). Из точки 1 проводим
прямую, параллельную линии ![]() (линии, выражающей закон
распределения скоростей для первого колеса). На пересечении этой линии с горизонтальной
прямой получим полюс построения Н. Проводим из полюса прямые
параллельные линиям, выражающим законы распределения скоростей для всех колес,
и получаем в пересечении с горизонтальной прямой точки 2, 3 и т. д. Отрезки
[01], [02] и т. д. будут в масштабе давать угловые скорости колес.
(линии, выражающей закон
распределения скоростей для первого колеса). На пересечении этой линии с горизонтальной
прямой получим полюс построения Н. Проводим из полюса прямые
параллельные линиям, выражающим законы распределения скоростей для всех колес,
и получаем в пересечении с горизонтальной прямой точки 2, 3 и т. д. Отрезки
[01], [02] и т. д. будут в масштабе давать угловые скорости колес.
Масштабный коэффициент
![]()
Определяем угловые скорости колес. Данные расчета приведены в таблице 3.2
Передаточное отношение редуктора определим из плана угловых скоростей
![]()
Таблица 3.2
| Колесо | Отрезок, мм |
Угловая скорость, с-1 |
| 1 | 150 | 3 |
| 2 | 141,66 | 2,8332 |
| 4 | 44,44 | 0,8888 |
| 5 | 111,11 | 2,2222 |
| 7 | 40,4 | 0,808 |
| 8 | 33,67 | 0,6734 |
3.4 Сравнение результатов кинематического анализа
Сравниваем передаточные отношения, найденные аналитическим и графическим способами.
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |