 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Разработка цифрового электропривода продольной подачи токарно-винторезного станка
·
ограничить
скоростную ошибку – первая асимптота должна занять определенное положение на
оси относительной амплитуды ![]() ;
;
· обеспечить устойчивую работу привода – ЛАЧХ имеет асимптоту, которая пересекает ось частот с наклоном 20 дБ/дек;
·
обеспечить
требуемый частотный диапазон привода и показатель колебательности – должна быть
обеспечена необходимая длина асимтоты в частотном диапазоне ![]() .
.
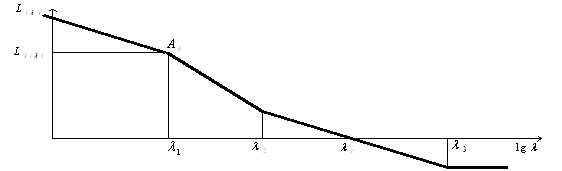
Рисунок 1.2 – желаемая форма ЛАЧХ цифрового электропривода
Желаемая ЛАЧХ описывается следующей дискретной частотной характеристики (ДЧХ):
 , (1.22)
, (1.22)
где ![]() ;
;  ;
;  ;
; ![]() – основные параметры,
определяемые требованиями к системе электропривода;
– основные параметры,
определяемые требованиями к системе электропривода;
 – характеристика запаздывания,
определяемая параметрами цифровой системы.
– характеристика запаздывания,
определяемая параметрами цифровой системы.
Для определения основных
параметров ДЧХ необходимо преобразовать заданные параметры технологического
процесса в эквивалентные параметры гармонического сигнала, которые позволяют
определить положение критической точки ![]() запретной
области ЛАЧХ.
запретной
области ЛАЧХ.
Преобразования параметров возможны в тех случаях, когда движения рабочих органов задаются в виде круговых траекторий. При развертке во времени одной из координат круговой траектории движения получим синусоиду:
![]() , (1.23)
, (1.23)
поверхности; ![]() – угловая скорость
(подача).
– угловая скорость
(подача).
Первая и вторая производные (скорость и ускорение) гармонического сигнала определяются известными выражениями:
![]() (1.24)
(1.24)
где индексы ![]() обозначают максимальные
(допускаемые) значения.
обозначают максимальные
(допускаемые) значения.
Отсюда можно определить эквивалентные параметры гармонического воздействия – частоту и амплитуду:
 ,
,  .
(1.25)
.
(1.25)
Максимальная ошибка для дискретной системы определяется выражением:
 , (1.26)
, (1.26)
где ![]() – дискретная частотная
характеристика системы,
– дискретная частотная
характеристика системы, ![]() –
псевдочастота.
–
псевдочастота.
Для низкочастотного
участка ЛАЧХ справедливо допущение ![]() . Тогда:
. Тогда:
![]() . (1.27)
. (1.27)
Если известно значение
ошибки ![]() , то должно быть выполнено
условие:
, то должно быть выполнено
условие:
![]() (1.28)
(1.28)
Для относительной
амплитуды ![]() это условие запишется в
следующем виде:
это условие запишется в
следующем виде:
![]() (1.29)
(1.29)
В системах управления
электроприводами значения максимальной скорости ![]() ,
допускаемого ускорения
,
допускаемого ускорения ![]() и допускаемой
скоростной ошибки
и допускаемой
скоростной ошибки ![]() известны.
известны.
Тогда, учитывая условия
преобразования, для обеспечения необходимой точности желаемая ЛАЧХ должна
проходить выше критической точки ![]() с
координатами:
с
координатами:
 ; (1.30)
; (1.30)
 . (1.31)
. (1.31)
 44.932 дБ
44.932 дБ
При этом запретная
область ограничивается по относительной амплитуде первой асимптотой, которая
проводится влево от точки ![]() с
наклоном -20 дБ/дек. По частоте эта запретная область ограничивается второй
асимптотой, которая проводится вправо от точки
с
наклоном -20 дБ/дек. По частоте эта запретная область ограничивается второй
асимптотой, которая проводится вправо от точки ![]() с
наклоном -40 дБ/дек. Положение запретной зоны показано на рисунке 1.3.
с
наклоном -40 дБ/дек. Положение запретной зоны показано на рисунке 1.3.
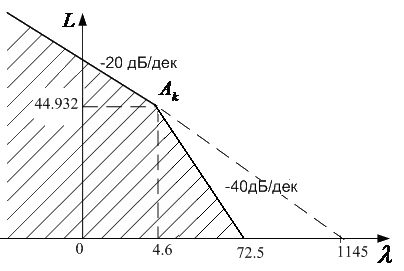
Рисунок 1.3 – Построение запретной зоны по критериям точности
Скоростная ошибка ![]() определяет необходимую
добротность системы по скорости
определяет необходимую
добротность системы по скорости ![]() ,
которая определяется по формуле:
,
которая определяется по формуле:
 , (1.32)
, (1.32)
Значение ![]() соответствует точке
пересечения линии, которая продолжает первую низкочастотную асимптоту, с осью
соответствует точке
пересечения линии, которая продолжает первую низкочастотную асимптоту, с осью ![]() .
.
После построения запретной области строятся логарифмические амплитудные и фазовые частотные характеристики. При построении следует придерживаться следующего порядка.
1.
Первая
низкочастотная асимптота желаемой ЛАХ проводится с наклоном –20 дБ/дек выше
точки ![]() на 3 дБ, чтобы обеспечить
запас устойчивости. Подъем характеристики приводит к увеличению коэффициента
добротности по скорости в
на 3 дБ, чтобы обеспечить
запас устойчивости. Подъем характеристики приводит к увеличению коэффициента
добротности по скорости в ![]() раза:
раза:
 . (1.33)
. (1.33)
2.
Вторая асимптота
проводится с наклоном –40 дБ/дек от точки сопряжения с координатами (![]() ;
; ![]() ) до точки пересечения с
осью , которая определяет базовую частоту
) до точки пересечения с
осью , которая определяет базовую частоту ![]() запретной
области:
запретной
области:
 . (1.34)
. (1.34)
3.
По заданному
показателю колебательности ![]() определяется
частота сопряжения второй и третьей асимптот:
определяется
частота сопряжения второй и третьей асимптот:
 . (1.35)
. (1.35)
4.
Третья асимптота
с наклоном –20 дБ/дек проводится от точки ![]() до
точки
до
точки ![]() , которая определяется из
условия обеспечения требуемого показателя колебательности:
, которая определяется из
условия обеспечения требуемого показателя колебательности:
 . (1.36)
. (1.36)
![]() вычисляется по соотношению:
вычисляется по соотношению:
 . (1.37)
. (1.37)
5.
Строится график ![]() запретной области фазовой
частотной характеристики:
запретной области фазовой
частотной характеристики:
 . (1.38)
. (1.38)
где ![]() – частота среза, которая
определяется по формуле:
– частота среза, которая
определяется по формуле:
 . (1.39)
. (1.39)
6.
Строится график
фазовой частотной характеристики ![]() :
:
 . (1.40)
. (1.40)
где ![]() – показатель
эквивалентного запаздывания, значение которого принимается равным 1.
– показатель
эквивалентного запаздывания, значение которого принимается равным 1.
На рисунке 1.4 показано
положение запретной области ![]() и
фазовой частотной характеристики
и
фазовой частотной характеристики ![]() .
.
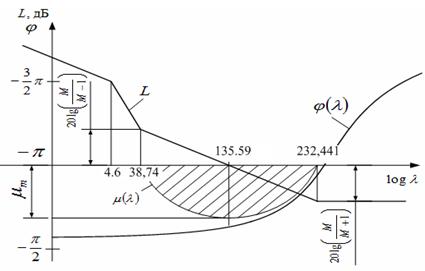
Рисунок 1.4 – Построение запретной области для фазовой характеристики
Построенные графики позволяют сделать вывод о запасе устойчивости системы управления по фазе. Фазовая характеристика не должна заходить в запретную область, для которой относительная логарифмическая амплитуда находится в пределах:
 . (1.41)
. (1.41)
![]() (1.42)
(1.42)
Если же это условие не
выполняется, то желаемый результат можно получить путем изменения частот
сопряжения ![]() и
и![]() , а также коэффициента
, а также коэффициента ![]() .
.
В верхнем диапазоне
частота ![]() определяет период
дискретности
определяет период
дискретности ![]() в соответствии с
выражением:
в соответствии с
выражением:
 . (1.43)
. (1.43)
Это значение и должно быть принято в последующих расчетах.
2. РАЗРАБОТКА ФУНКЦИОНАЛЬНОЙ СХЕМЫ
Задачи проектирования систем управления на локальном уровне, чаще всего, касаются систем электроприводов, выполняющих определенные рабочие движения. В технологическом оборудовании машиностроительного производства используются регулируемые и следящие электроприводы с двигателями постоянного или переменного тока.
Пример функциональной схемы следящего электропривода с двигателем постоянного тока приведен на рисунке 2.1.
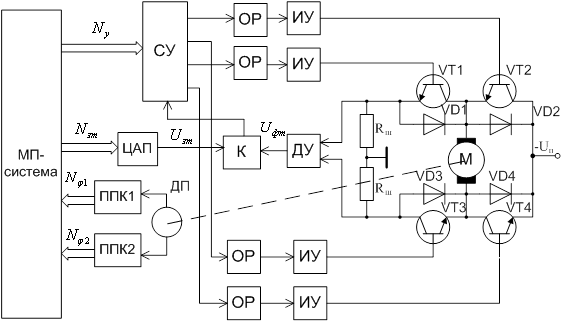
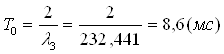
Рисунок 2.1 – Функциональная схема следящего электропривода с ШИП и релейным контуром тока
В этом следящем
электроприводе измерительная система имеет двухотсчетный преобразователь
перемещение-код (ППК1 и ППК2). В контуре тока в качестве датчиков обратной
связи применены шунты RШ. Для усиления напряжения, которое снимается
с шунтов (UШ = 0...75 мВ), и формирования двухполярного сигнала
используется дифференциальный усилитель ДУ. Выходное напряжение усилителя ![]() , соответствующее
фактическому значению тока, через гальваническую развязку поступает на один
вход компаратора К, а на другой подается выходное напряжение цифро-аналогового
преобразователя (ЦАП), который преобразует код задания тока
, соответствующее
фактическому значению тока, через гальваническую развязку поступает на один
вход компаратора К, а на другой подается выходное напряжение цифро-аналогового
преобразователя (ЦАП), который преобразует код задания тока ![]() в аналоговый сигнал
задания
в аналоговый сигнал
задания ![]() .
.
Логический сигнал с
выхода компаратора поступает на схему управления СУ, которая предназначена для
преобразования кода управления ![]() в
длительности импульсов переключения силовых транзисторов. Эти импульсы через
оптронную развязку ОР и импульсные усилители ИУ подаются на базы транзисторных
ключей VT1…VT4, образующих мостовую схему. С целью устранения сквозных токов
при переключении пар организуется безтоковая пауза. В качестве силовых
элементов применены биполярные транзисторы ТКД.
в
длительности импульсов переключения силовых транзисторов. Эти импульсы через
оптронную развязку ОР и импульсные усилители ИУ подаются на базы транзисторных
ключей VT1…VT4, образующих мостовую схему. С целью устранения сквозных токов
при переключении пар организуется безтоковая пауза. В качестве силовых
элементов применены биполярные транзисторы ТКД.
Информация с
преобразователей перемещение-код сравнивается с кодом задания, ошибка
обрабатывается с помощью программы регулятора, который выполняет расчет кода
управления ![]() и уровня ограничения тока
и уровня ограничения тока ![]() в функции скорости. Для
регулирования приняты: пропорциональный закон в контуре положения с введением
сигнала компенсации скоростной ошибки и
пропорционально-интегрально-дифференциальный (ПИД) закон в контуре скорости.
Период дискретности системы управления составляет 1 мс.
в функции скорости. Для
регулирования приняты: пропорциональный закон в контуре положения с введением
сигнала компенсации скоростной ошибки и
пропорционально-интегрально-дифференциальный (ПИД) закон в контуре скорости.
Период дискретности системы управления составляет 1 мс.
На рынке Украины широко представлены микроконтроллеры известных фирм SIEMENS, ABB, INTEL и многих других. Микропроцессоры серии ARM7 компании PHILIPS не уступают аналогам по техническими и экономическими характеристиками. Преимуществом микропроцессоров данной серии есть большое количество технической документации и легкий доступ к ней.
Структурная схема микроконтроллера LPC2148 представлена на рис. 2.2.
Для работы контроллера необходимо одно источник питания +3В. Через два программируемых порта ввода/вывода LPC2148 взаимодействует со средой в стандарте ТТЛ-схем с тремя состояниями выхода.
Важной особенностью АЛУ является его способность оперировать не только байтами, но и битами.
Рисунок 2.2 – Структурная схема микроконтроллера LPC2148
Контроллер LPC2148 как видно из рисунка имеет:
тестовый интерфейс, позволяющий проводить пошаговое выполнение программы;
ОЗУ память ;
FLASH память;
векторный контроллер прерываний;
интерфейсы SSP, SPI, I2C;
два UART;
часы реального времени;
ЦАП ;
два АЦП;
два таймера захвата/сравнения;
WDT;
Два режима работы обычный и экономный;
Кварцевый резонатор, который подключается к внешним выводам ХTAL1 и ХTAL2, управляет работой внутреннего генератора, который в свою очередь формирует сигналы синхронизации.
3. МЕТОДИКА МАТЕМАТИЧЕСКОГО ОПИСАНИЯ ПРИВОДА ПОСТОЯННОГО ТОКА ДИСКРЕТНЫМИ ФУНКЦИЯМИ
Применение цифровых систем управления электроприводами постоянного тока требует особого подхода к их математическому описанию и моделированию. Это обусловлено наличием квантования непрерывных функций (тока, скорости, положения) по уровню и времени, а также запаздыванием результатов расчетов.
Для анализа и синтеза цифровых систем управления применяют метод дискретных передаточных функций (ДПФ) и метод дискретных частотных характеристик (ДЧХ).
Первый метод дает возможность оптимизировать динамические характеристики во временной области, однако на практике его применение ограничивается системами невысокого порядка.
Метод ДЧХ позволяет осуществлять синтез регулятора в частотной области. Он значительно проще метода ДПФ, однако его применение возможно только при определенных соотношениях между частотой квантования, частотой среза и малыми постоянными времени. Синтезированный по этому метода регулятор не является строго оптимальным; так как фактически метод основан на аналогии дискретных и непрерывных систем при малых значениях периода квантования. Однако если учесть, что система управления приводом строится по структуре подчиненного регулирования, метод ДЧХ является единственным средством математического описания привода.
Модель цифрового электропривода может быть представлена двумя частями – неизменяемой частью (НЧ), которая охватывает все элементы объекта (преобразователь, двигатель, кинематическую схему и др.) и дискретной частью (МП-система), которая реализует корректирующий алгоритм цифрового регулятора.
Структурная схема цифровой системы электропривода представлена на рисунке 3.1.
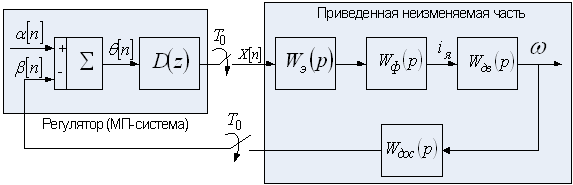
Рисунок 3.1 – Структурная схема системы электропривода
Неизменяемая часть
описывается обычно дифференциальными уравнениями, представленными передаточной
функцией ![]() , а цифровые регуляторы –
уравнениями в разностной форме, представленными передаточной функцией
, а цифровые регуляторы –
уравнениями в разностной форме, представленными передаточной функцией ![]() .
.
Единое представление этих частей системы может быть получено с помощью z-преобразования и связанного с ним билинейного w-преобразования.
Задающее воздействие ![]() и сигнал обратной связи
и сигнал обратной связи ![]() представляют собой
решетчатые функции. Функция сигнала ошибки
представляют собой
решетчатые функции. Функция сигнала ошибки ![]() под
действием корректирующего алгоритма цифрового регулятора, описываемого
дискретной передаточной функцией (ДПФ)
под
действием корректирующего алгоритма цифрового регулятора, описываемого
дискретной передаточной функцией (ДПФ) ![]() ,
превращается в решетчатую функцию управления
,
превращается в решетчатую функцию управления ![]() .
Соединение дискретной части с неизменяемой частью обеспечиваются фиксатором.
.
Соединение дискретной части с неизменяемой частью обеспечиваются фиксатором.
Выходной сигнал
фиксатора, например, регистра или цифро-аналогового преобразователя, должен
быть экстраполированным, то есть преобразованным в непрерывную форму. Обычно
сигнал экстраполируется функцией нулевого порядка ![]() .
.
Объединив экстраполятор с неизменяемой частью, получим приведенную неизменяемую часть с передаточной функцией:
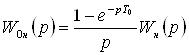 . (3.1)
. (3.1)
Дискретная передаточная функция неизменяемой части представляется Z-преобразованием:
![]() (3.2)
(3.2)
где ![]() – z-преобразование
передаточной функции приведенной неизменяемой части;
– z-преобразование
передаточной функции приведенной неизменяемой части; ![]() .
.
Неизменяемая часть
включает в себя экстраполятор, формирователь тока якоря, двигатель постоянного
тока и датчик обратной связи, которые описываются передаточными функциями – ![]() ,
, ![]() ,
, ![]()
![]() , соответственно.
, соответственно.
Передаточная функция формирователя тока описывает соединение двух звеньев, включенных последовательно и образующих единую систему – преобразователь (ТП или ШИП) и якорную цепь двигателя. В результате такого объединения исключается математическое описание преобразователя, который имеет сложную форму выходного напряжения, и математический анализ производится относительно импульсов тока якоря, форма которых проще. При этом передаточная функция формирователя тока приобретает следующий вид:
 , (3.3)
, (3.3)
где
![]() – коэффициент передачи по
току;
– коэффициент передачи по
току;
![]() – относительная длительность импульса напряжения (
– относительная длительность импульса напряжения (![]() <1);
<1);
![]() – целое число периодов дискретности
– целое число периодов дискретности ![]() ,
на которое запаздывает импульс напряжения относительно времени подачи
управляющего сигнала, принимаем l=1 (для ШИП);
,
на которое запаздывает импульс напряжения относительно времени подачи
управляющего сигнала, принимаем l=1 (для ШИП);
![]() – дробная часть периода дискретности
– дробная часть периода дискретности ![]() (0<
(0<![]() <1), характеризующая
величину запаздывания импульса напряжения;
<1), характеризующая
величину запаздывания импульса напряжения;
![]() – функция запаздывания;
– функция запаздывания;
 – функция длительности импульса напряжения.
– функция длительности импульса напряжения.
![]() – постоянная времени якорной цепи двигателя.
– постоянная времени якорной цепи двигателя.
Постоянная времени цепи
якоря ![]() , определяется по формуле:
, определяется по формуле:
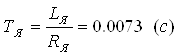 , (3.4)
, (3.4)
где ![]() – суммарные значения
индуктивностей и сопротивлений обмотки якоря электродвигателя, трансформатора,
уравнительных реакторов и дросселя, соединительных проводов и силовой цепи
преобразователя.
– суммарные значения
индуктивностей и сопротивлений обмотки якоря электродвигателя, трансформатора,
уравнительных реакторов и дросселя, соединительных проводов и силовой цепи
преобразователя.
Учитывая, что передаточная функция якорной цепи введена в передаточную функцию формирователя тока, в структуре двигателя (рисунок 3.2) остается лишь звено, описывающее электромеханическую часть двигателя:
 . где
. где ![]() . (3.5)
. (3.5)
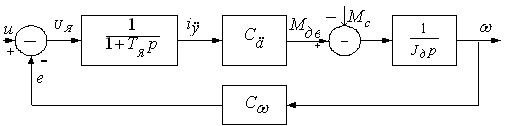
Рисунок 3.2 – Структурная схема двигателя постоянного тока
В качестве датчиков скорости применяются устройства, инерционность которых неизмеримо мала по сравнению с периодом дискретности. Поэтому они могут быть представлены пропорциональным звеном с передаточной функцией:
![]() . (3.6)
. (3.6)
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |