 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Математическая модель в пространстве состояний линейного стационарного объекта управления
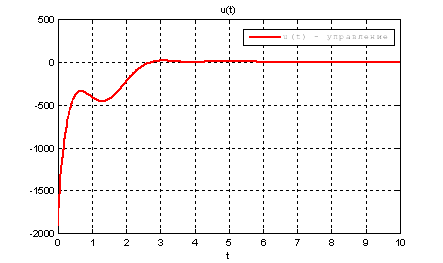
Рис.25. График управления.
Выводы: т.к. решения уравнения Риккати методом диагонализации и интегрирования в обратном времени дают практически одинаковый результат, то можно считать, что задача АКОР – стабилизации на полубесконечном интервале решена с заданной точностью.
5.2 Стабилизации объекта управления на конечном интервале времени
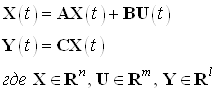
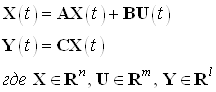
Рассмотрим линейный объект управления, описываемый системой дифференциальных уравнений в нормальной форме
Начальные условия для заданной
системы ![]()
Время стабилизации ![]() .
.
Необходимо получить закон управления
![]()
минимизирующий функционал вида

Закон оптимального управления в данной задаче имеет вид
![]()
Матричное дифференциальное уравнение Риккати будет иметь следующий вид:
![]()
Если
обозначить ![]() то можно записать
то можно записать
![]()
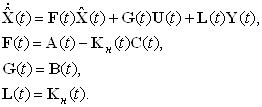
Уравнение замкнутой скорректированной системы примет вид
![]()
Матрицы ![]() заданы
в пункте 5.1.1.
заданы
в пункте 5.1.1.
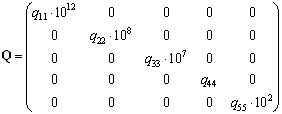
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
 ,
, ![]() .
.
Используя скрипт AKOR_stabilizaciya_na_konech_interval.m получили следующие результаты:
Рис.26. Графики решения уравнения Риккати.
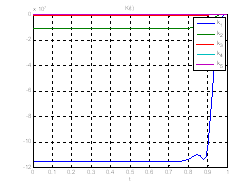
Рис.27. Графики коэффициентов регулятора обратной связи.
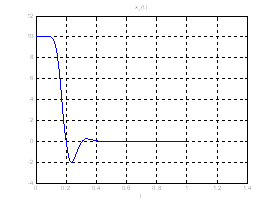
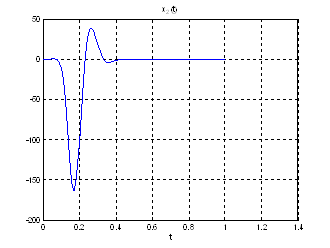
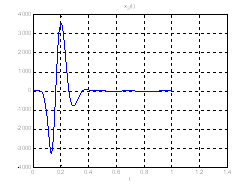
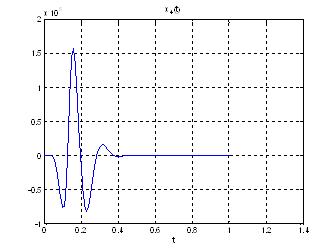
Рис.28. Графики фазовых координат.
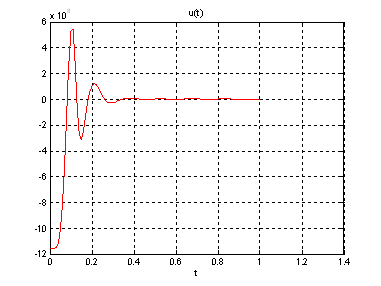
Рис.29. График управления.
Сравним, как стабилизируется система управления с постоянными и переменными коэффициентами регулятора обратной связи на начальном этапе:
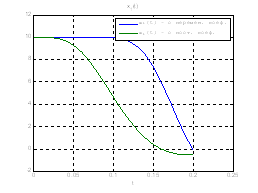
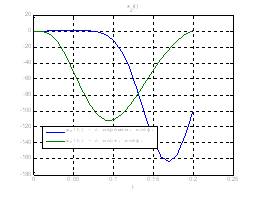
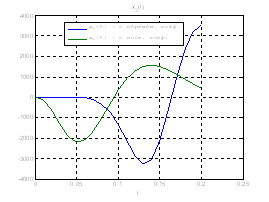
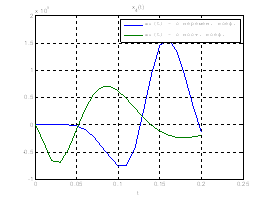
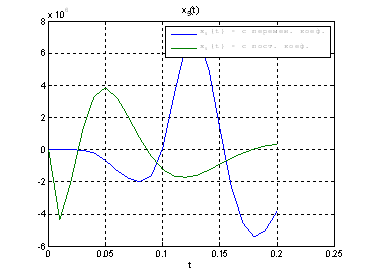
Рис.30. Графики фазовых координат.
Выводы: из графиков видно, что система, у которой коэффициенты регулятора меняются со временем, стабилизируется не хуже, чем, система, у которой коэффициенты регулятора не изменяются.
5.3 Задача АКОР – стабилизации для
компенсации
известного возмущающего воздействия
Рассмотрим систему вида
![]() ,
,
где ![]() – возмущающее
воздействие.
– возмущающее
воздействие.
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
 ,
, ![]() .
.
Начальные условия для заданной
системы ![]() .
.
Время стабилизации ![]() .
.
Задаем возмущающее воздействие только на первую координату, так как только она имеет значение
 и
и  .
.
Решение задачи стабилизации сводится к решению уравнения Риккати
![]()
с начальными условиями: ![]()
Введём вспомогательную
вектор-функцию ![]() , ДУ которой имеет
вид:
, ДУ которой имеет
вид:
![]()
с начальными условиями: ![]() .
.
Управление определяется по формуле:
![]() .
.
Используя скрипт AKOR_stabilizaciya_pri_vozmusheniyah.m, получили следующие результаты:
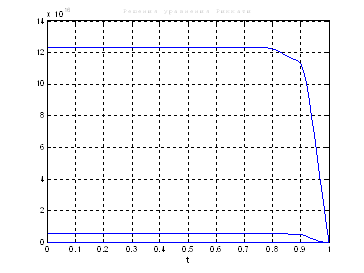
Рис.31. Графики решения уравнения Риккати.
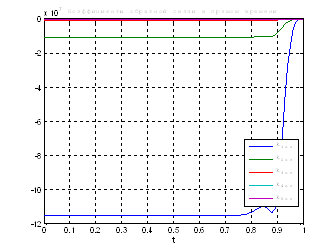
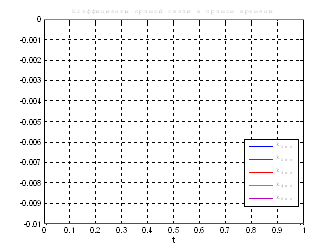
Рис.32. Графики коэффициентов регулятора обратной и прямой связи.
Рис.33. График возмущающего воздействия.
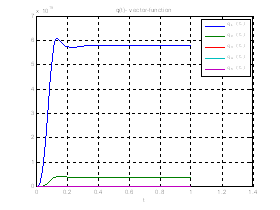
Рис.34. График вспомогательной вектор – функции.
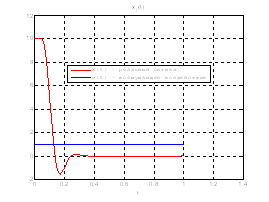
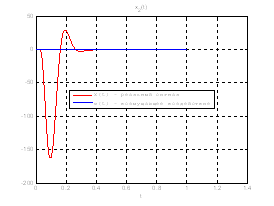
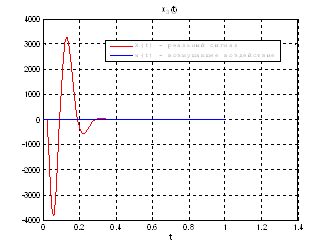
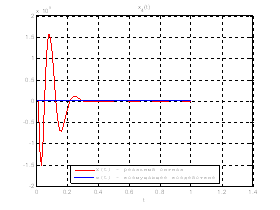
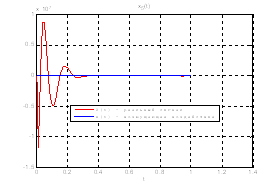
Рис.35. Графики фазовых координат.
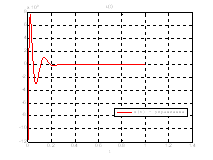
Рис.36. График управления.
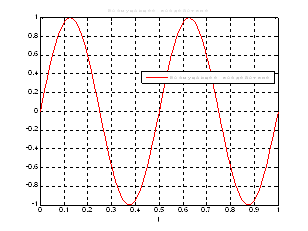
Рис.37. График возмущающего воздействия.
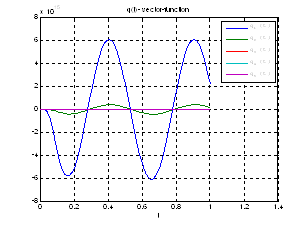
Рис.38. График вспомогательной вектор – функции.
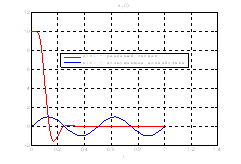
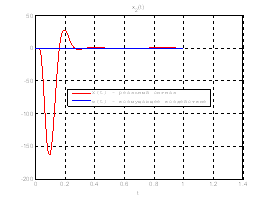
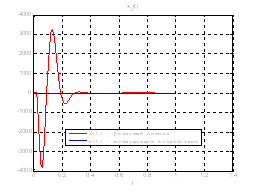
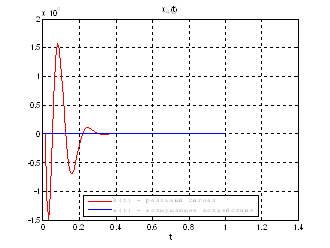
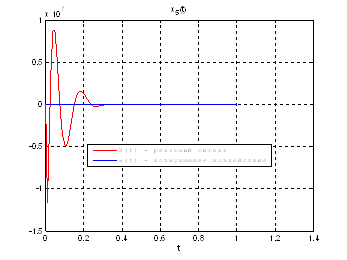
Рис.39. Графики фазовых координат.
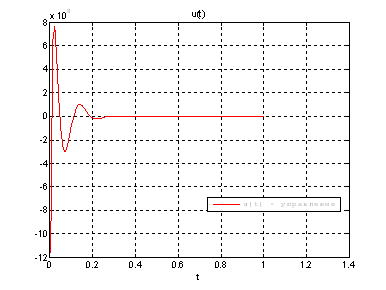
Рис.40. График управления.
Выводы: По графикам фазовых координат при различных воздействиях видно, что влияние возмущающего воздействия не существенно и фазовые координаты устанавливаются в ноль. При этом видно, что графики первой фазовой координаты при различных воздействиях мало отличаются друг от друга, т.е. система отрабатывает любое возмущение.
5.4 Задача АКОР для отслеживания известного задающего воздействия. I подход
Система задана в виде:
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
 ,
, ![]() .
.
Начальные условия для заданной
системы ![]() .
.
Время слежения ![]() .
.
Задающее воздействие в виде системы ДУ
Начальные условия для воздействия:
![]() .
.
Введем расширенный вектор
состояния и расширенные матрицы ![]()
 ,
,
 ,
,
 .
.
Тогда новое описание системы имеет вид:
![]()
с начальными условиями:  .
.
Решением уравнения Риккати будет матрица:
с н.у.![]()
Тогда оптимальное управление, находится по формуле:
![]()
Используя скрипт AKOR_slegenie_na_konech_interval_I_podxod, получили следующие результаты:
Рис.41. Графики решения уравнения Риккати.
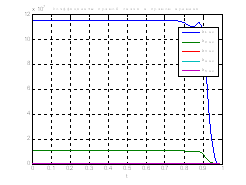
Рис.42. Графики коэффициентов регулятора обратной и прямой связи.
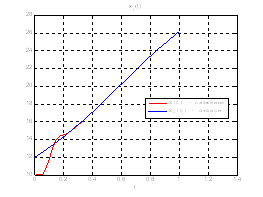
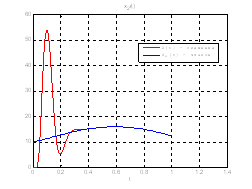
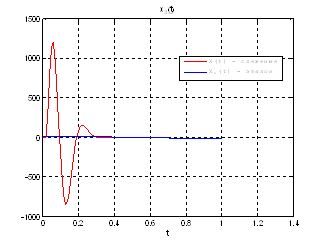
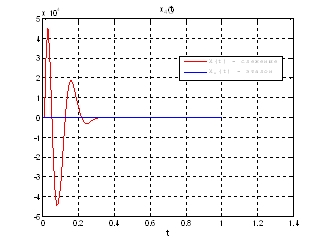
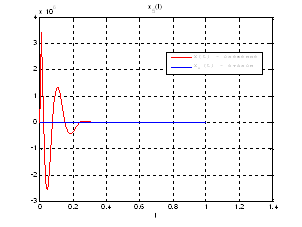
Рис.43. Графики фазовых координат.
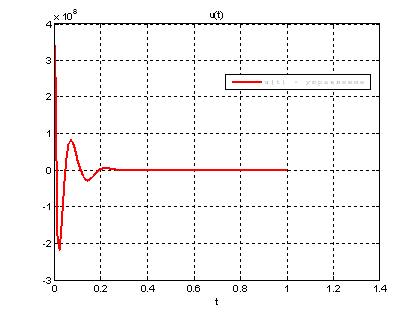
Рис.44. График управления.
Выводы: На данном этапе была решена задача АКОР-слежения. В качестве отслеживаемого воздействия была взята исходная система, но с другими начальными условиями, поэтому графики фазовых координат отличаются от заданных, но только на начальном участке движения.
5.5 Задача АКОР для отслеживания известного задающего воздействия. II подход (линейный сервомеханизм)
Система задана в виде:
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
 ,
, ![]() .
.
Начальные условия для заданной
системы ![]() .
.
Задающее воздействие имеет вид:
![]() ,
, ![]() .
.
Время слежения ![]()
Введём вспомогательную
вектор-функцию ![]() , ДУ которой
определяется
, ДУ которой
определяется ![]()
![]() ,
,
![]() ,
,
НУ определяются из соотношения
Зная закон изменения ![]() и
и ![]() , можно определить
управление:
, можно определить
управление:
![]() .
.
Используя скрипт AKOR_slegenie_na_konech_interval_II_podxod, получили следующие результаты:
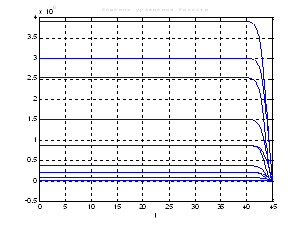
Рис.45. Графики решения уравнения Риккати.
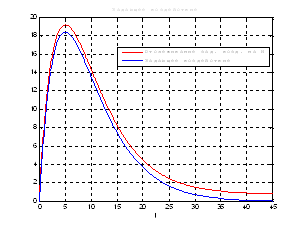
Рис.46. График задающего воздействия.
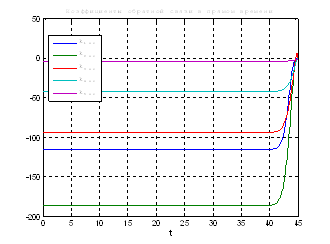
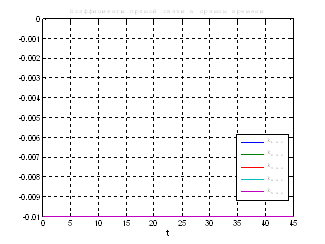
Рис.47. Графики коэффициентов регулятора обратной и прямой связи.
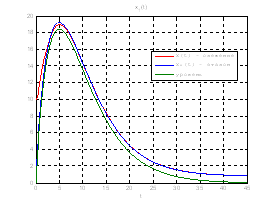
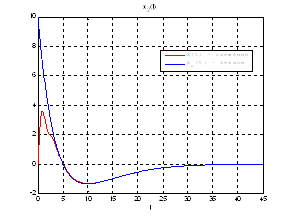
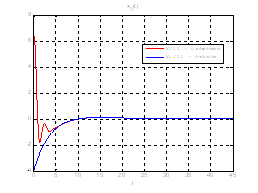
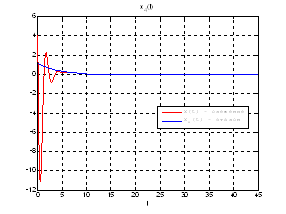
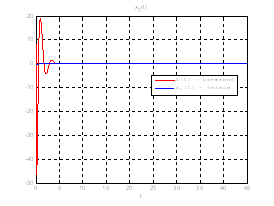
Рис.48. Графики фазовых координат.
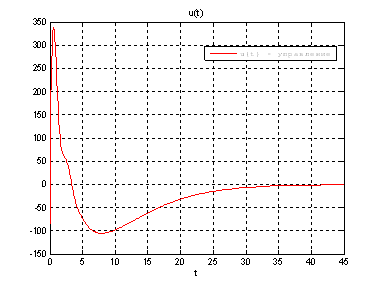
Рис.49. График управления.
Выводы: На данном этапе была решена задача построения линейного сервомеханизма. В качестве отслеживаемого воздействия была задана экспоненциальная функция. Анализируя выше приведенные графики, можно сказать, что все состояния заданной системы, особенно первая фазовая координата, отслеживается с заданной точностью.
5.6 Задача АКОР – слежения со скользящими интервалами
Пусть интервал времени ![]() является объединением
нескольких отрезков. Известно некоторое задающее воздействие
является объединением
нескольких отрезков. Известно некоторое задающее воздействие ![]() заданное аналитическим
выражением, причем информация о задающем сигнале на следующем отрезке времени
поступает только в конце предыдущего. Таким образом, зная задающий сигнал
только на одном отрезке времени, мы будем синтезировать управление на этом
отрезке.
заданное аналитическим
выражением, причем информация о задающем сигнале на следующем отрезке времени
поступает только в конце предыдущего. Таким образом, зная задающий сигнал
только на одном отрезке времени, мы будем синтезировать управление на этом
отрезке.
Разобьем весь интервал на 3 равных отрезка.
Данная задача похожа на задачу отслеживания известного задающего воздействия, заданного аналитическим выражением, но с некоторыми изменениями:
1. Поскольку в уравнение Риккати
относительно матрицы ![]() входят только
параметры системы и функционала качества, то решать его будем один раз на
первом отрезке, так как на остальных отрезках решение будет иметь тот же вид, но
будет смещено по времени:
входят только
параметры системы и функционала качества, то решать его будем один раз на
первом отрезке, так как на остальных отрезках решение будет иметь тот же вид, но
будет смещено по времени:
![]()
![]()
![]()
![]()
2. Начальными условиями для системы на каждом отрезке будет точка, в которую пришла система на предыдущем отрезке:
![]()
![]()
![]()
![]()
3. Вектор ![]() необходимо пересчитывать
на каждом отрезке.
необходимо пересчитывать
на каждом отрезке.
4. В остальном данная задача аналогична задаче построения линейного сервомеханизма (пункт 5.5).
Используя скрипт AKOR_slegenie_so_skolz_intervalami_Modern, получили следующие результаты:
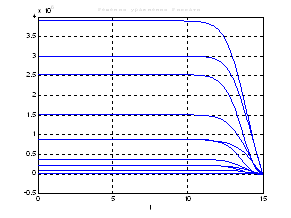
Рис.50. Графики решения уравнения Риккати.
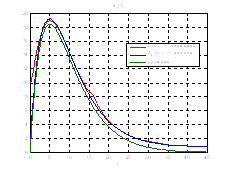
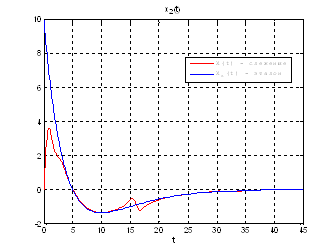
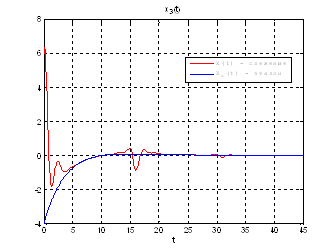
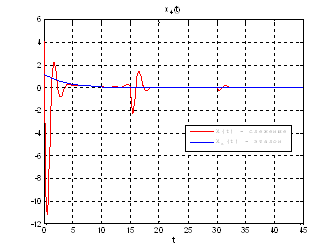
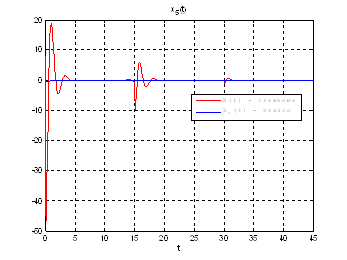
Рис.51. Графики фазовых координат.
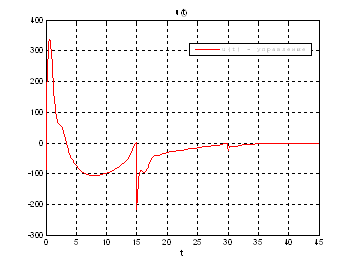
Рис.52. График управления.
Выводы: при сравнении полученных результатов, можно сказать, что различия в фазовых координатах при наличии трех участков и при наличии одного участка несущественные. Если сравнивать скорость вычислений и используемые ресурсы, то скорость увеличивается почти в 3 раза, а памяти требуется в 3 раза меньше для решения поставленной задачи. В точках соединения участков наблюдаются скачки, связанные с тем, что требуется значительные затраты на управление, но для первой координаты этот скачок незначительный.
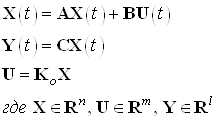
6. Синтез наблюдателя полного порядка
Наблюдателями называются
динамические устройства, которые позволяют по известному входному и выходному
сигналу системы управления получить оценку вектора состояния. Причем ошибка
восстановления ![]() .
.
Система задана в виде:
Начальные условия для заданной
системы ![]() .
.
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
 ,
, ![]() .
.
Построим наблюдатель
полного порядка и получим значения наблюдаемых координат ![]() таких, что:
таких, что: ![]()
В качестве начальных условий для наблюдателя выберем нулевые н.у.:
![]()
Ранг матрицы наблюдаемости:
![]() - матрица
- матрица
наблюдаемости.
 .
.
![]() .
.
Т. е. система является наблюдаемой.
Коэффициенты регулятора:
![]() ,
,
тогда

Собственные значения
матрицы ![]() :
:
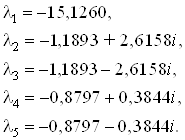
Коэффициенты наблюдателя
выберем из условия того, чтобы наблюдатель был устойчивым, и ближайший к началу
координат корень матрицы ![]() лежал
в 3 – 5 раз левее, чем наиболее быстрый корень матрицы
лежал
в 3 – 5 раз левее, чем наиболее быстрый корень матрицы ![]() . Выберем корни матрицы
. Выберем корни матрицы
![]()
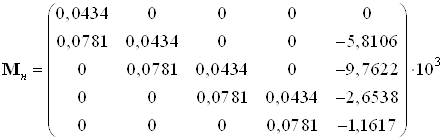
Коэффициенты матрицы наблюдателя:
![]() .
.
Используя скрипт Sintez_nablyud_polnogo_poryadka, получили следующие результаты:
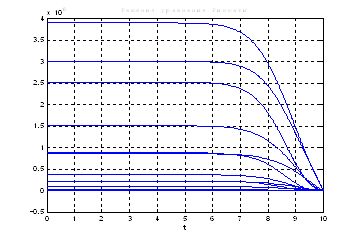
Рис.53. Графики решения уравнения Риккати.
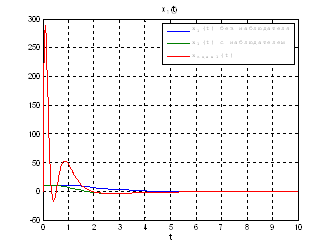
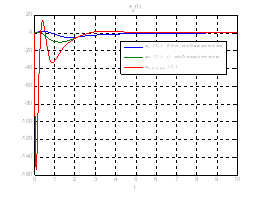
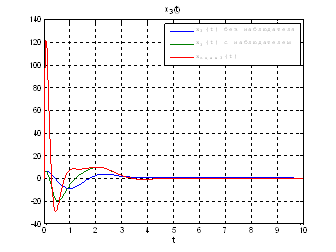
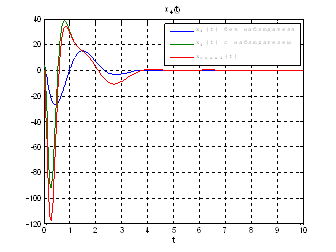
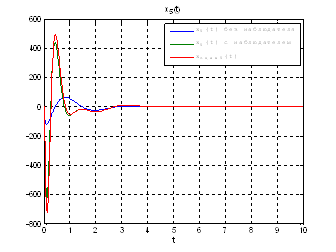
Рис.54. Графики фазовых координат.
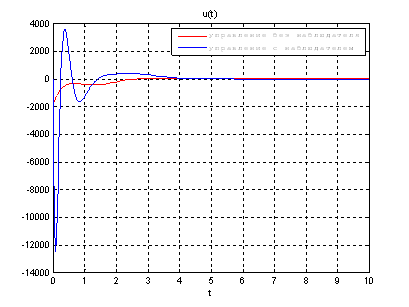
Рис.55. Графики управлений.
Выводы: Так как система является полностью
наблюдаема и полностью управляема, то спектр матрицы ![]() может располагаться
произвольно. Перемещая собственные значения матрицы
может располагаться
произвольно. Перемещая собственные значения матрицы ![]() левее,
относительно собственных значений матрицы
левее,
относительно собственных значений матрицы ![]() мы улучшаем динамику
системы, однако, наблюдатель становится более чувствителен к шумам.
мы улучшаем динамику
системы, однако, наблюдатель становится более чувствителен к шумам.
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |