 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Математическая модель в пространстве состояний линейного стационарного объекта управления

и подставим в целевую
функцию. Получим ![]() – строку
– строку
 (15)
(15)
Решаем задачу (12) – (14) симплекс-методом.
В случае,
если ![]() ,
, ![]() – малое число
– малое число ![]()
иначе
1) если ![]() увеличить
увеличить ![]() и целое,рвернуться к первому
шагу формирования задачи линейного программирования;
и целое,рвернуться к первому
шагу формирования задачи линейного программирования;
2) если ![]() (не все управления будут
равны предельным, могут быть, в том числе нулевые)),
(не все управления будут
равны предельным, могут быть, в том числе нулевые)), ![]() , уменьшить
, уменьшить ![]() , вернуться к первому шагу
формирования задачи линейного программирования.
, вернуться к первому шагу
формирования задачи линейного программирования.
Решения данной задачи
получено с помощью пакета Matlab
7.4 (скрипт SimplexMetod2.m): ![]()
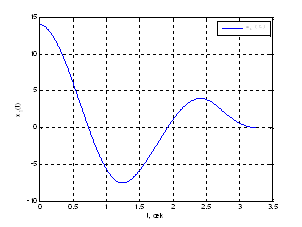
Рис. 14. График фазовой координаты ![]() .
.
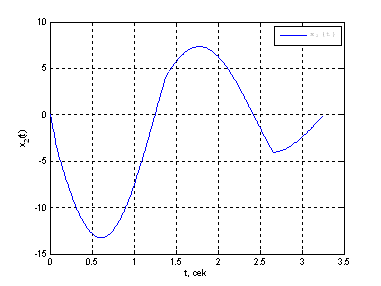
Рис. 15. График фазовой координаты ![]() .
.
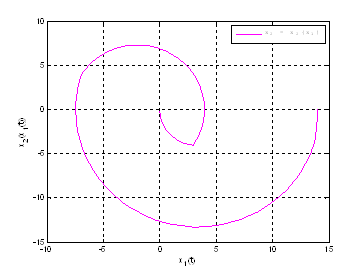
Рис. 16. График ![]() .
.
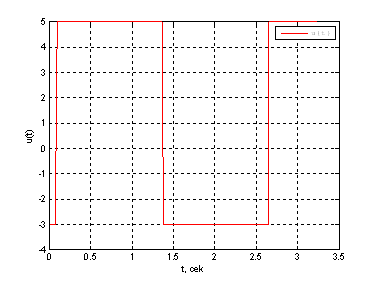
Рис. 17. График оптимального управления ![]() .
.
Выводы: Сравнивая полученные результаты с
результатами полученными в ДЗ№2 по СУЛА, можно сделать вывод, что решения
совпадают, с точностью до ![]() .
.
3. Оптимальная L – проблема моментов
3.1 Оптимальная L – проблема моментов в пространстве «вход-выход»
Укороченная система данного объекта имеет вид:
 ,
,
где:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Полюса укороченной передаточной функции:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Заданы начальные и конечные условия:
 ,
,  ,
, ![]() .
.
Для
определения начальных и конечных условий для ![]() воспользуемся
следующей формулой:
воспользуемся
следующей формулой:
![]() ,
,
Где
матрица ![]() имеет следующий вид
имеет следующий вид
 ,
,
где ![]() ,
, ![]() .
.
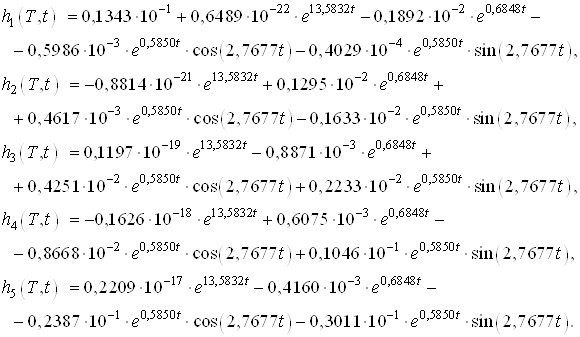
ИПФ укороченной системы:
![]()
Составим фундаментальную систему решений:
ФСР:  .
.
Составим матрицу ![]() .
.
![]() , где
, где ![]() –
матрица Вронского
–
матрица Вронского
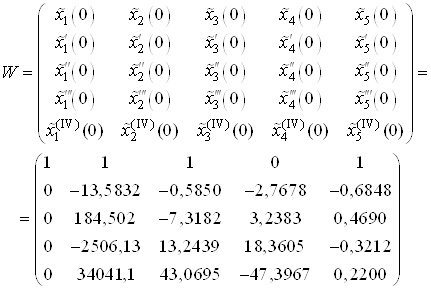
 ,
,
Тогда
 .
.
Составим моментные уравнения (связь между входом и выходом):
Моментные функции определяются по следующей формуле
Составим моментные функции:
Найдем моменты по следующей формуле:
 .
.
Числовое значение найденных моментов:
Составим функционал качества, который имеет следующий вид:

при условии, что : , т.е.
, т.е. ![]()
Выразим из данного
условия ![]() , тогда получим следующее
равенство:
, тогда получим следующее
равенство:
 .
.
Подставляя полученное
равенство в функционал и заменяя ![]() их
правыми частями получаем
их
правыми частями получаем

Найдем частные производные
 и приравняем их к нулю.
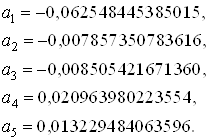
Решая полученную систему уравнений, определяем оптимальные значения
коэффициентов
и приравняем их к нулю.
Решая полученную систему уравнений, определяем оптимальные значения
коэффициентов ![]() , а
, а ![]() вычислим по формуле
вычислим по формуле
 .
.
Т.о. имеем:
Минимальная энергия:
![]()
Найдем управление по следующей формуле:
Тогда оптимальное управление
 .
.
3.2 Оптимальная L – проблема моментов в пространстве состояний
Система задана в виде:
Решение ДУ имеет вид:
 , при
, при ![]() имеем:
имеем:
 .
.
Составим моментные уравнения:
![]()
Подставляя необходимые данные в выше приведенные формулы, получим следующие моменты и моментные функции:
Числовое значение найденных моментов:
Моментные функции:
Заметим, что моменты и моментные функции совпадают с моментами и моментными функциями, найденными в пункте (а).
Из этого следует,
что функционал, значения ![]() ,
управление и минимальная энергия будут иметь точно такие же числовые значения и
аналитические выражения, как и в пункте (3.1).
,
управление и минимальная энергия будут иметь точно такие же числовые значения и
аналитические выражения, как и в пункте (3.1).
Оптимальное управление имеет вид:

Проверим правильность полученного решения.
Эталонные значения координат в начальный и конечный момент времени:
 ,
, 
 ,
, 
Найденные значения координат в начальный и конечный момент времени:
 ,
, 
 ,
, 
Вычислим погрешность полученных результатов:
 ,
, 
 ,
, 
Ниже представлены графики полученного решения с помощью скрипта Optimal_L_problem_moments.m.
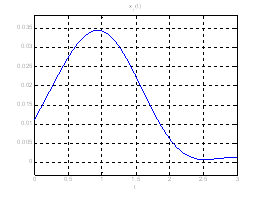
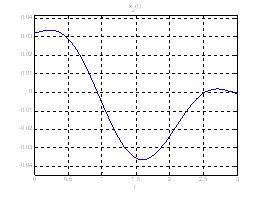
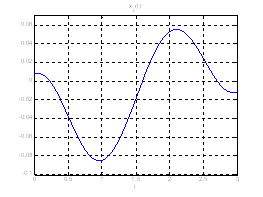
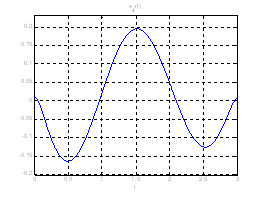
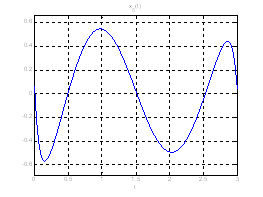
Рис. 18. Графики фазовых координат системы при переходе из ![]() в
в ![]() .
.
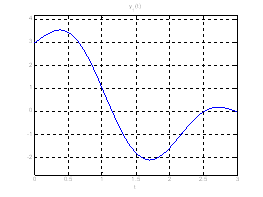
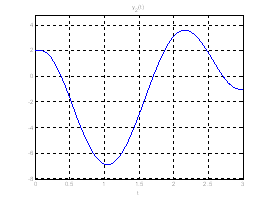
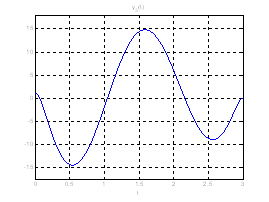
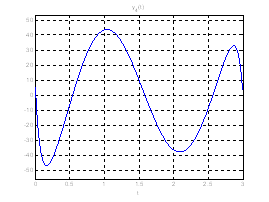
Рис. 19. Графики выходных координат системы при переходе из ![]() в
в ![]() .
.
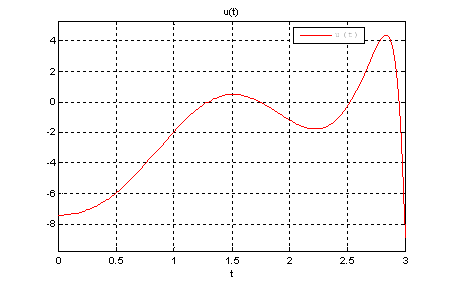
Рис.20. График оптимального управления ![]() .
.
Выводы: Задача перевода системы из начальной точки в конечную с помощью L-проблемы моментов в пространстве состояний и в пространстве вход-выход была решена с точностью до 12-го знака после запятой. Результаты, полученные при переводе системы из начальной точки в конечную, полностью совпадают.
4. Нахождение оптимального управления с использованием грамиана управляемости (критерий – минимизация энергии)
Система имеет вид:
с начальными условиями:
 ,
, 
![]() .
.
Составим матрицу управляемости и проверим управляемость системы:
![]()

![]() .
.
Составим грамиан управляемости для данной системы:
Найдем грамиан по формуле:

Тогда управление имеет вид:
![]() .
.
или

Ниже представлен график оптимального управления полученного с помощью скрипта Gramian_Uprav.m.:
Рис.21. График оптимального управления ![]() .
.
Графики фазовых координат аналогичны, как и в оптимальной L – проблеме моментов.
Сравним управление, полученное в начальной и конечной точках в пунктах 3 и 4 соответственно:
 и
и 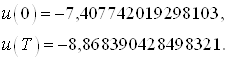
Выводы: Как видно, значения граничных управлений совпадают. А это значит, что задача перевода объекта из начального состояния в конечное решена с высокой степенью точности и с минимальной энергией.
Графическое сравнение оптимальных управлений из пунктов 3 и 4:
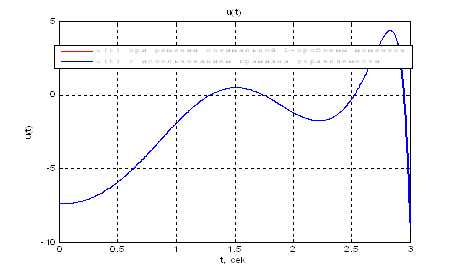
Рис.21. Сравнение графиков оптимального
управления ![]() .
.
5. Аналитическое конструирование оптимальных регуляторов (АКОР)
5.1 Стабилизации объекта управления на полубесконечном интервале времени
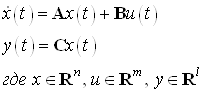
Рассмотрим линейный объект управления, описываемый системой дифференциальных уравнений в нормальной форме
Необходимо получить закон управления
![]()
минимизирующий функционал вида

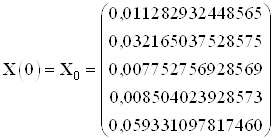
Начальные условия для заданной
системы ![]()
Моменты времени ![]() фиксированы. Матрицы
фиксированы. Матрицы ![]() — симметричные неотрицательно
определенные:
— симметричные неотрицательно
определенные:
![]()
матрица ![]() —
положительно определенная:
—
положительно определенная:
![]()
Матричное дифференциальное уравнение Риккати имеет вид:
![]()
Если линейная стационарная
система является полностью управляемой и наблюдаемой, то решение
уравнения Риккати при ![]() стремится к
установившемуся решению
стремится к
установившемуся решению ![]() не
зависящему от
не
зависящему от ![]() и определяется
следующим алгебраическим уравнением:
и определяется
следующим алгебраическим уравнением:
![]()
В рассматриваемом случае
весовые матрицы ![]() и
и ![]() в функционале не зависят
от времени.
в функционале не зависят
от времени.
Оптимальное значение функционала равно
![]()
и является квадратичной функцией от начальных значений отклонения вектора состояния.
Таким образом, получаем,
что при ![]() оптимальное управление
приобретает форму стационарной обратной связи по состоянию
оптимальное управление
приобретает форму стационарной обратной связи по состоянию
![]()
где ![]() —
решение алгебраического матричного уравнения Риккати.
—
решение алгебраического матричного уравнения Риккати.
5.1.1. Решение алгебраического уравнения Риккати методом диагонализации
Для решения данной задачи
найдем весовые матрицы ![]() и
и ![]() :
:
Выберем произвольно ![]() , тогда
, тогда

Взяв значения ![]() из решения задачи L – проблемы моментов получим:
из решения задачи L – проблемы моментов получим:
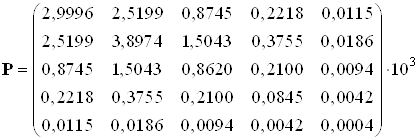
Матрицы системы имеют вид:

 ,
, ![]() .
.
Введем расширенный вектор
состояния  .
.
Тогда матрица Z будет иметь следующий вид:  ,
,
или в численном виде
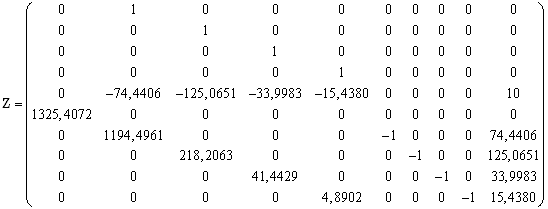 .
.
Собственные значения матрицы
![]() :
: 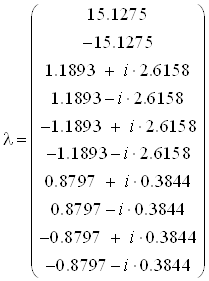 .
.
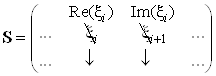
Зная собственные значения
и собственные вектора матрицы Z,
построим матрицу ![]()
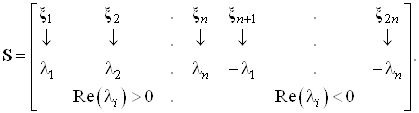
По определению все
решения должны быть устойчивы при любых начальных условиях ![]() , т.е. при
, т.е. при ![]() . Чтобы не оперировать
комплексными числами, осуществим следующий переход. Пусть:
. Чтобы не оперировать
комплексными числами, осуществим следующий переход. Пусть:
Тогда матрица ![]() формируется следующим
образом:
формируется следующим
образом:
 .
.
Можно показать, что матрицу можно получить из прямой матрицы собственных векторов:
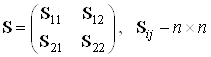 ,
,
![]() .
.
Установившееся решение уравнения Риккати, полученное с помощью скрипта Solve_Riccati_Method_Diag.m. имеет вид:
5.1.2 Решение алгебраического уравнения Риккати интегрированием в обратном времени до установившегося состояния
Весовые матрицы ![]() и
и ![]() такие же как и в пункте
(5.1.1).
такие же как и в пункте
(5.1.1).
Матрицы ![]() тоже аналогичны.
тоже аналогичны.
Запишем уравнение Риккати
![]() .
.
Зная, что ![]() , решаем уравнение методом
обратного интегрирования на достаточно большом интервале (примерно 10 с.),
получим установившееся решение с помощью скрипта
, решаем уравнение методом
обратного интегрирования на достаточно большом интервале (примерно 10 с.),
получим установившееся решение с помощью скрипта
Solve_Riccati_Method_Revers_Integr.m.:
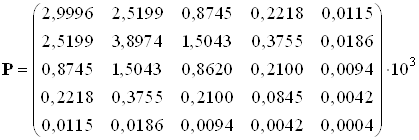
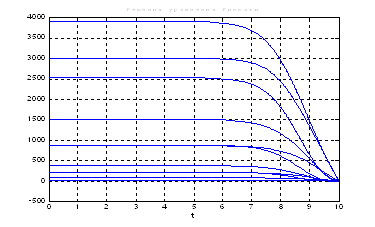
Рис.22. Графики решения уравнения Риккати.
Найдем разницу между решениями уравнения Риккати в пунктах 5.1.1 и 5.1.2:
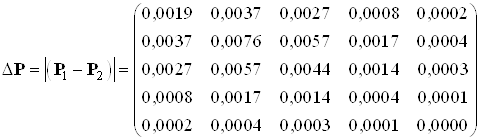
Выводы: сравнивая решения полученные в пунктах 5.1.1 и 5.1.2 можно сказать, что решения уравнения Риккати первым и вторым методами совпадают с заданной точностью. Погрешность расхождения решений невелика.
Используя скрипт AKOR_stabilizaciya_na_polybeskon_interval.m получим коэффициенты регулятора, фазовые координаты системы и управление.
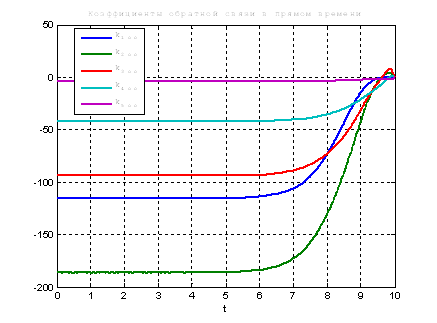
Рис.23. Графики коэффициентов регулятора обратной связи.
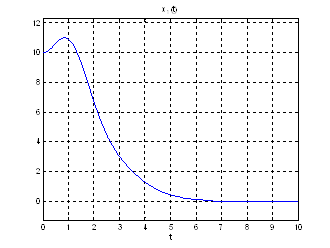
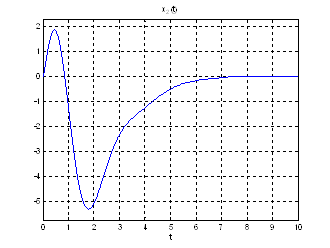
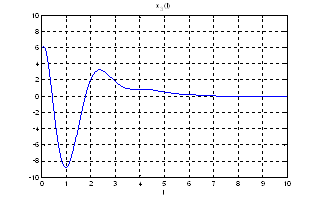
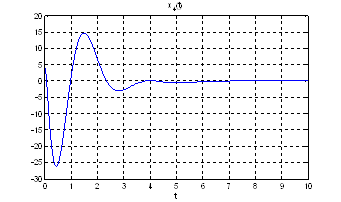
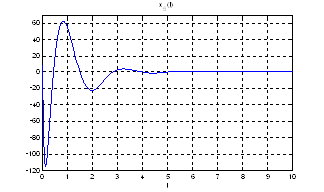
Рис.24. Графики фазовых координат.
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |