 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Математическая модель в пространстве состояний линейного стационарного объекта управления
Курсовая работа: Математическая модель в пространстве состояний линейного стационарного объекта управления
СОДЕРЖАНИЕ
1. Анализ объекта управления
1.1 Анализ линейного стационарного объекта управления, заданного передаточной функцией
1.2 Получение математической модели в пространстве состояний линейного стационарного объекта управления, заданного передаточной функцией
1.2.1 Матрица Фробениуса
1.2.2 Метод параллельной декомпозиции
2. Решение задачи быстродействия симплекс-методом
3. Оптимальная l – проблема моментов
3.1 Оптимальная l – проблема моментов в пространстве «вход-выход»
3.2 Оптимальная l – проблема моментов в пространстве состояний
4. Нахождение оптимального управления с использованием грамиана управляемости (критерий – минимизация энергии)
5. Аналитическое конструирование оптимальных регуляторов (акор)
5.1 Стабилизации объекта управления на полубесконечном интервале времени
5.1.1 Решение алгебраического уравнения Риккати методом диагонализации
5.1.2 Решение алгебраического уравнения Риккати интегрированием в обратном времени до установившегося состояния
5.2 Стабилизации объекта управления на конечном интервале времени
5.3 Задача акор – стабилизации для компенсации известного возмущающего воздействия.
5.4 Задача акор для отслеживания известного задающего воздействия. i подход
5.5 Задача акор для отслеживания известного задающего воздействия. ii подход (линейный сервомеханизм)
5.6 Задача акор – слежения со скользящими интервалами.
6. Синтез наблюдателя полного порядка
Литература
Приложение
PlotTimeFrHaract.m
ProstranstvoSostoyanii.m
SimplexMetod2.m
Optimal_L_problem_moments.m
Gramian_Uprav.m
AKOR_stabilizaciya_na_polybeskon_interval.m
AKOR_stabilizaciya_na_konech_interval.m
Sravnenie_stabilizacii.m
AKOR_stabilizaciya_pri_vozmusheniyah.m
AKOR_slegenie_na_konech_interval_I_podxod.m
AKOR_slegenie_na_konech_interval_II_podxod.m
AKOR_slegenie_so_skolz_intervalami_Modern.m
Sintez_nablyud_polnogo_poryadka.m
Solve_Riccati_Method_Diag.m
Solve_Riccati_Method_Revers_Integr.m
Vozmyshyayushee_Vozdeistvie_Discrete_Revers.m
Zadayushee_Vozdeistvie_Discrete_Revers_Modern.m
1.1 Анализ линейного стационарного объекта управления, заданного передаточной функцией
Передаточная функция данного объекта имеет вид:
 ,
,
где:
![]() ,
, ![]() ;
;
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
или
 .
.
Нули передаточной функции:
![]()
Полюса передаточной функции (полученные стандартными функциями среды Matlab 7.4):
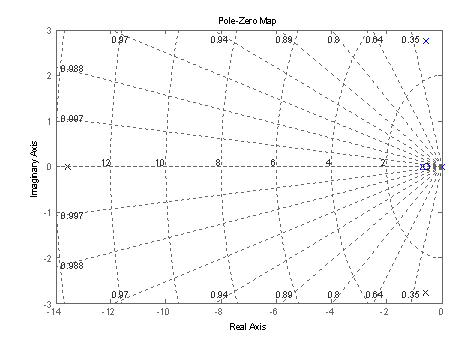
Рис.1. График расположения нулей и полюсов передаточной функции объекта на комплексной плоскости.
Найдем временные характеристики объекта управления.
К временным
характеристикам относятся ![]() и
и
![]() .
.
![]() – переходная характеристика;
– переходная характеристика;
![]() – импульсная переходная функция;
– импульсная переходная функция;
Для нахождения ![]() и
и ![]() воспользуемся пакетом Matlab 7.4.
воспользуемся пакетом Matlab 7.4.
 ,
,
Аналитическое выражение
для ![]() :
:

В этом случае ![]() имеет вид
имеет вид
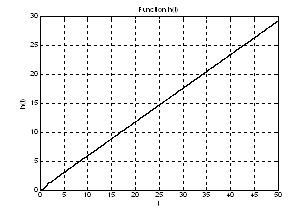
Рис.2. График переходной характеристики ![]() .
.
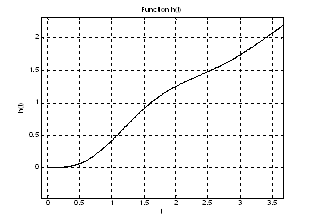
Рис.3. График переходной характеристики ![]() на интервале
на интервале ![]() (увеличенное).
(увеличенное).
 ,
,
Аналитическое выражение
для ![]() :
:
 .
.
В этом случае ![]() имеет вид
имеет вид
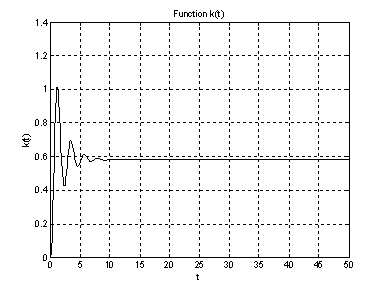
Рис.4. График импульсной переходной
характеристики ![]() .
.
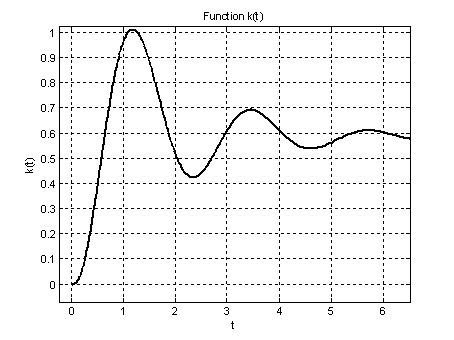
Рис.5. График импульсной переходной
характеристики ![]() на интервале
на интервале ![]() (увеличенное).
(увеличенное).
Найдем частотные характеристики объекта управления.
К частотным характеристикам относятся:
амплитудно – частотная характеристика (АЧХ),
фазо – частотная характеристика (ФЧХ),
амплитудно – фазовая частотная характеристика (АФЧХ),
Аналитическое выражение для АЧХ:
 .
.
В этом случае АЧХ имеет вид
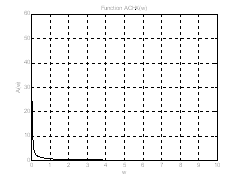
Рис.6. График АЧХ
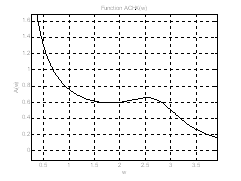
Рис.7. График АЧХ на интервале ![]() (увеличенное). Аналитическое
выражение для ФЧХ:
(увеличенное). Аналитическое
выражение для ФЧХ:
В этом случае ФЧХ имеет вид
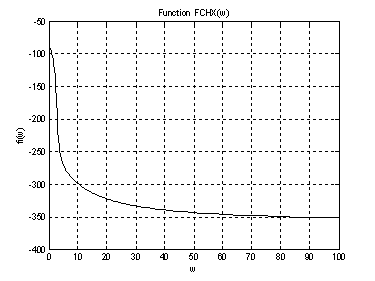
Рис.8. График ФЧХ .
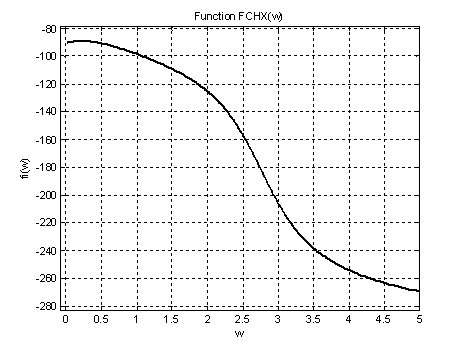
Рис.9. График ФЧХ на интервале ![]() (увеличенное).
(увеличенное).
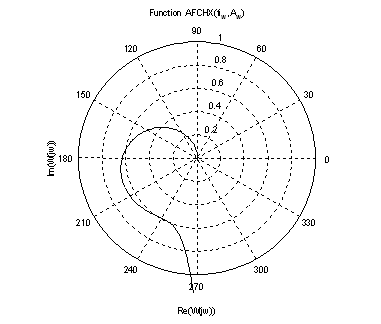
Рис.10. График АФЧХ.
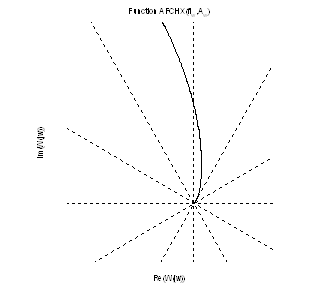
Рис.11. График АФЧХ (увеличенное).
Аналитическое выражение для ЛАЧХ:
 .
.
В этом случае ЛАЧХ имеет вид
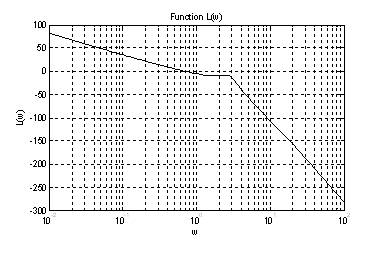
Рис.12. График ЛАЧХ.
Аналитическое выражение для ЛФЧХ:
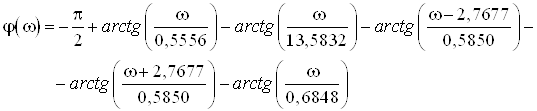
В этом случае ЛФЧХ имеет вид
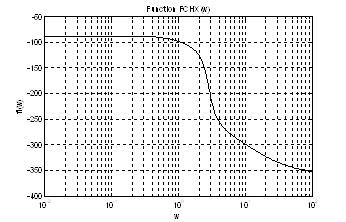
Рис.13. График ЛФЧХ.
1.2 Получение математической модели в пространстве состояний линейного стационарного объекта управления, заданного передаточной функцией
Передаточная функция данного объекта имеет вид:
![]()
 ,
,
где:
![]() ,
, ![]() ;
;
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
или

Описание системы в пространстве состояний имеет следующий вид:
Переходя в область изображений описание системы в пространстве состояний будет иметь следующий вид:

1.2.1 Матрица Фробениуса
Получим выражения, которые определяют вектор состояний и выход заданного объекта в общем виде:
 .
.
 .
.
Тогда получим:
![]() (1)
(1)
![]() (2)
(2)
Числитель передаточной
функции имеет вид: ![]() .
.
Знаменатель передаточной функции:
![]() .
.
Тогда согласно равенству (1) и (2) имеем
![]() ,
,
![]() .
.
Перейдем из области изображений в область оригиналов
![]() ,
,
![]()
и затем перейдем к нормальной форме Коши
![]() .
.
Запишем матрицы состояний
 ,
,  ,
, ![]()
Численное значение матриц состояний:
 ,
,  ,
,
![]()
1.2.2 Метод параллельной декомпозиции
Запишем передаточную функцию объекта в другом виде, а именно:

или
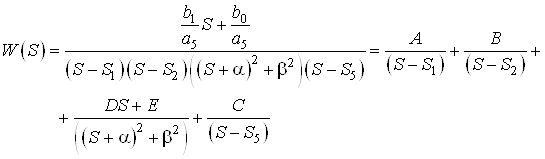 .
.
Согласно формуле ![]() получим
получим

Рассмотрим каждое из слагаемых в отдельности согласно принципу параллельной декомпозиции.
a.
 ,
,
![]() .
.
b.
 ,
,
![]() .
.
c.
 ,
,
![]() ,
,
![]() ,
,

![]()

![]()
d.
 ,
,
![]()
Получим выход системы:

![]()
Запишем матрицы состояний
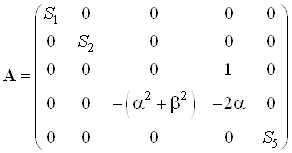 ,
, 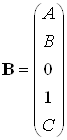 ,
, ![]()
Вычисление коэффициентов
разложения дробной рациональной функции ![]() на
сумму элементарных дробей и проверка правильности получения матриц состояния сделано
с помощью пакета Matlab 7.4 (скрипт
ProstranstvoSostoyanii.m)
на
сумму элементарных дробей и проверка правильности получения матриц состояния сделано
с помощью пакета Matlab 7.4 (скрипт
ProstranstvoSostoyanii.m)
Получены следующие результаты:Матрица СЛАУ:
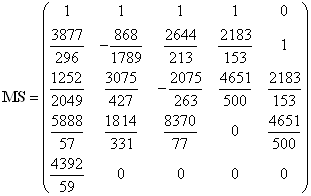 ,
,  ,
,
![]() ,
,

Численное значение матриц состояний:
 ,
,  ,
,
![]() .
.
2. Решение задачи быстродействия симплекс-методом
Дана система:
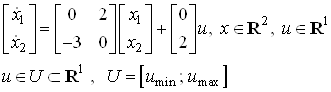 (3)
(3)
1. Проверим управляемость данной системы.
Запишем систему ДУ в матричном виде:
![]() ,
,
где  .
.
Данная система является
стационарной, её порядок ![]() ,
поэтому матрица управляемости имеет вид:
,
поэтому матрица управляемости имеет вид:
![]()
Найдем матрицу управляемости:
Ранг матрицы управляемости равен порядку системы, следовательно, данная система является управляемой.
![]() следовательно
следовательно ![]() .
.
Собственные числа матрицы
![]() найдем из уравнения
найдем из уравнения
![]() :
:



Действительные части
собственных значений матрицы ![]() являются
неположительными, следовательно, все условия управляемости выполнены.
являются
неположительными, следовательно, все условия управляемости выполнены.
2. Ссылаясь на решение задачи быстродействия из ДЗ№2 по СУЛА «Решение задачи быстродействия» имеем:
Запишем зависимости ![]() ,
, ![]() , полученные при решении
систем дифференциальных уравнений:
, полученные при решении
систем дифференциальных уравнений:
 :
:
 :
:
 :
:
 :
:
Перейдем к дискретной модели заданной системы. Имеем
![]() (4)
(4)
где ![]() шаг дискретизации и
соответствующие матрицы
шаг дискретизации и
соответствующие матрицы
 (5)
(5)
Пусть управление ограничено интервальным ограничением
![]() (6)
(6)
Тогда на ![]() шаге имеем
шаге имеем
 (7)
(7)
Известны начальная и конечная точки
где ![]() – оптимальное число шагов в
задаче быстродействия.
– оптимальное число шагов в
задаче быстродействия.
Решается задача быстродействия
![]()
а) Формирование задачи быстродействия как задачи линейного программирования
Конечная точка ![]() в дискретной модели
представлена в виде
в дискретной модели
представлена в виде
 (8)
(8)
Получаем ![]() – равенств
– равенств
 (9)
(9)
Для приведения ограничений (9) к канонической форме сделаем необходимое преобразование в правой и левой частях, чтобы правые части были неотрицательными (если правая часть меньше нуля, то домножаем на (-1) левую и правую части). Отметим проведенные изменения точкой в правом верхнем углу соответствующих векторов
 . (10)
. (10)
Для того чтобы получить
необходимый допустимый базис для задачи линейного программирования, добавим
формально остаточные искусственные переменные (![]() ).
Таким образом, уравнения (10) представляются в виде
).
Таким образом, уравнения (10) представляются в виде
 (11)
(11)
Так как текущее
управление ![]() – управление имеет любой
знак,
– управление имеет любой
знак, ![]() то сделаем необходимую
замену
то сделаем необходимую
замену
![]()
Тогда уравнения (11) примут вид
 (12)
(12)
Введем остаточные переменные в ограничения на управление
![]()
![]()
 (13)
(13)
При объединении выражений
(12) и (13) получаем ![]() ограничений.
ограничений.
Начальный допустимый базис состоит из остаточных и остаточных искусственных переменных
![]()
Формируем целевую функцию (по второму методу выбора начального допустимого базиса)
 (14)
(14)
б) Решение задачи быстродействия
Предположим, что ![]() , где
, где ![]() – оптимальное число шагов.
Так как значение
– оптимальное число шагов.
Так как значение ![]() нам неизвестно
(но
нам неизвестно
(но ![]() известно точно), выбираем
некоторое начальное
известно точно), выбираем
некоторое начальное ![]() и решаем задачу
линейного программирования (12)-(14).
и решаем задачу
линейного программирования (12)-(14).
При этом
Общее число столбцов в
симплекс-таблице: ![]()
Число базисных переменных:
![]()
Сформируем ![]() строку. Имеем
строку. Имеем

Выразим из уравнения (12)
начальные базисные переменные ![]()
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |