 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Синтез керуючих автоматів
Табл. 3.6 – Таблиця кодів станів автомата з природною адресацією команд
| № п/п | Стан | Код |
| 1 |
b0 |
000000 |
| 2 |
b1 |
000001 |
| 3 |
b2 |
000010 |
| 4 |
b3 |
000011 |
| 5 |
b4 |
000100 |
| 6 |
b5 |
000101 |
| 7 |
b6 |
000110 |
| 8 |
b7 |
000111 |
| 9 |
b8 |
001000 |
| 10 |
b9 |
001001 |
| 11 |
b10 |
001010 |
| 12 |
b11 |
001011 |
| 13 |
b12 |
001100 |
| 14 |
b13 |
001101 |
| 15 |
b14 |
001110 |
| 16 |
b15 |
001111 |
| 17 |
b16 |
010000 |
| 18 |
b17 |
010001 |
| 19 |
b18 |
010010 |
| 20 |
b19 |
010011 |
| 21 |
b20 |
010100 |
| 22 |
b21 |
010101 |
| 23 |
b22 |
010110 |
| 24 |
b23 |
010111 |
| 25 |
b24 |
011000 |
| 26 |
b25 |
011001 |
| 27 |
b26 |
011010 |
| 28 |
b27 |
011011 |
| 29 |
b28 |
011100 |
| 30 |
b29 |
011101 |
| 31 |
b30 |
011110 |
| 32 |
b31 |
011111 |
| 33 |
b32 |
100000 |
| 34 |
b33 |
100001 |
| 35 |
b34 |
100010 |
| 36 |
b35 |
100011 |
| 37 |
b36 |
100100 |
| 38 |
b37 |
100101 |
| 39 |
b38 |
100110 |
| 40 |
b39 |
100111 |
| 41 |
b40 |
101000 |
| 42 |
b41 |
101001 |
| 43 |
b42 |
101010 |
| 44 |
b43 |
101011 |
| 45 |
b44 |
101100 |
| 46 |
b45 |
101101 |
| 47 |
b46 |
101110 |
| 48 |
b47 |
101111 |
| 49 |
b48 |
110000 |
| 50 |
b49 |
110001 |
Табл. 3.7 – Таблиця вхідних сигналів автомата з природною адресацією команд
| № п/п | Вхідний стан | Код |
| 1 |
Х0 |
000 |
| 2 |
Х1 |
001 |
| 3 |
Х2 |
010 |
| 4 |
Х3 |
011 |
| 5 |
X4 |
100 |
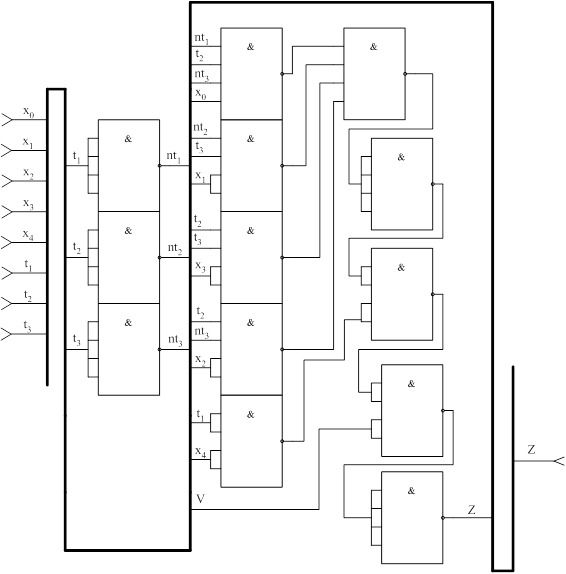
Рівняння вихідних сигналів та їх синтез у заданий базис:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Синтез мультиплексора
Табл. 3.8 – Карта Карно до мультиплексора
|
|
00 | 01 | 11 | 10 |
|
0 1 |
x0 |
x1 |
x3 |
x2 |
|
x4 |
* | * | * |

4. ПОРІВНЯЛЬНА ХАРАКТЕРИСТИКА АВТОМАТІВ
4.1 Порівняльна характеристика автоматів з жорсткою логікою
Розрахуємо усі дані по формулам:
![]()
N - кількість великих елементів.
Nвх – кількість входів на великі елементи.
n – кількість малих елементів.
nвх - кількість входів на малі елементи.
Nтр – кількість тригерів у схемі
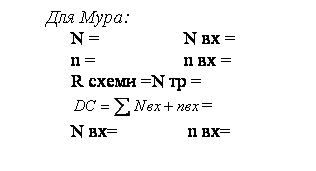
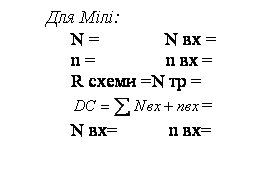
Табл. 4.1 – Таблиця обліку апаратурних витрат автоматів з жорсткою логікою
| R схеми | Тригер | DC | |
| Мура | |||
| Мілі |
З таблиці 4.1 видно, що R схеми у Мура менше, але входів на DC більше.
Тригерів однакова кількість.
4.2 Порівняльна характеристика автоматів з програмованою логікою
![]()
![]()
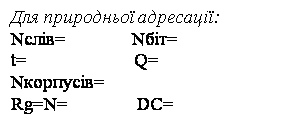
Табл.4.2 Таблиця обліку апаратурних витрат автоматів з програмованою логікою
| ПЗУ | Регістр лічильник | Комбінаційна частина | DC | |
| Примусова | ||||
| Природна |
У автомата з природною адресацією МК більш мінімальні апаратні витрати (корпусів), ніж у автомата з примусовою адресацією.
Тригерів однакова кількість. Кількість входів на DC однакова.
Комбінаційна
частина у АПЛ з природною адресацією більша,
ніж у примусової.
ВИСНОВОК
операційний керуючий автомат програмований логіка
Виконано курсовий проект з дисципліни „Прикладна теорія цифрових автоматів” на тему „Синтез керуючих автоматів”.
Були синтезовані основні типи автоматів з жорсткою та програмованою логікою. Хоча всі приведені автомати справилися з поставленою задачею і в достатній мірі реалізували схему керуючого автомата, але є деякі позитивні і негативні особливості синтезу кожного з автоматів. Наприклад, автомати з жорсткою логікою мають досить велику комбінаційну частину, але вони не потребують елементів ROM, це робить ці автомати дуже оптимальними за ціною затрат.
Автомати з програмованою логікою виявились досить складними в розрахунках і реалізації, але це повністю компенсувалось універсальністю та гнучкістю програмування, чого не можна було досягнути на автоматах з жорсткою логікою.