 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Разработка АСР температуры обжига цементного клинкера с циклонным теплообменником
Согласно данной методике при выборе типа регулятора сначала определяемся с видом переходного процесса, который хотят получить.
Апериодический (без перерегулирования), когда требуется исключить влияние регулирующего воздействия на другие переменные объекта.
С 20% -ным перерегулированием, при котором обеспечивается малое время переходного процесса.
С минимальной интегральной квадратичной оценкой, при которой обеспечивается наименьшее значение суммарного динамического отклонения (компромисс между быстродействием и устойчивостью системы).
Требуемое качество регулирования в процессе эксплуатации АСР, кроме безусловного требования устойчивости, определяется следующими критериями: минимальное время регулирования, отсутствие перерегулирования и др.
Выбор того или иного критерия оптимальности определяется технологическими требованиями к системе регулирования и является одной из первых задач по выбору типового регулятора. С экономической и в ряде случаев с технологической точки зрения наиболее целесообразно применять в качестве критерия оптимальности минимальную интегральную квадратичную оценку, так как реализация такого критерия почти всегда приводит к минимальным потерям при регулировании и к минимальным динамическим ошибкам. Однако, если параметры системы недостаточно точно известны или если они изменяются, то наличие в системе, настроенной по данному критерию, продолжительных колебаний может привести к неустойчивой работе регулятора или резонансным явлениям.
Наибольшим запасом по устойчивости обладают системы, настроенные по критерию с минимальным временем регулирования и без перерегулирования. Когда требуется исключить влияние регулирующего воздействия данной системы на другие величины сложного объекта, целесообразно, чтобы переходный процесс имел апериодический характер.
Вторым этапом по выбору регулятора является определение типа (закона) регулятора. Существуют различные таблицы, графики, номограммы по выбору регулятора, зависящие от динамических свойств объекта, относительной нагрузки, характера ее изменения, заданных показателей качества регулирования.
Основные области применения линейных регуляторов определяются с учетом следующих рекомендаций:
И-регулятор со статическим ОР - при медленных изменениях возмущений и малом времени запаздывания (τ/То< 0,1);
П-регулятор со статическим и астатическим ОР - при любой инертности и времени запаздывания, определяемые соотношением τ/То ≤ 0,1;
ПИ-регулятор при любой инертности и времени запаздывания ОР, определяемом соотношением τ/То ≤ 1;
ПД и ПИД - регуляторы при условии τ/То ≤ 1 и малой колебательности переходных процессов.
Учитывая то, что передаточная функция у меня имеет вид:
![]() ,
,
и τ/То = 0,17 можно сделать вывод, что в нашем случае (контур регулирования температурного режима обжига цементного клинкера) подходящим является ПИ-регулятор. Если при дальнейших расчетах окажется, что ПИ-регулятор не удовлетворяет заданным условиям, нам необходимо выбрать более сложный (и следовательно, более дорогой) ПИД-регулятор, который имеет лучшие показатели регулирования.
3.1 Определение параметров настройки ПИ - регулятора
Для определения параметров настройки ПИ - регулятора используем пакет прикладных программ для построения нелинейных систем управления Signal Constant, который реализует метод динамической оптимизации. Этот инструмент, строго говоря, представляющий собой набор блоков, разработанных для использования с Simulink, автоматически настраивает параметры моделируемых систем, основываясь на определённых пользователем ограничениях на их временные характеристики.
Типовой сеанс работы в среде Simulink с Использованием возможностей и блоков Signal Constant состоит из ряда стадий, описанных ниже.
В среде Simulink создается модель исследуемой динамической системы (в общем случае нелинейной).
Входы блоков Signal Constant соединяются с теми сигналами системы, на которые накладываются ограничения. Этими сигналами могут быть, например, выходы системы, их среднеквадратические отклонения и т.д.
В режиме командной строки МАТLAB
задаются начальные значения параметров подлежащих оптимизации, ![]() .
.
Двойным щелчком на пиктограмме Signal Constant данные блоки "раскрываются".
При помощи мыши нужным образом изменяются конфигурации и размеры областей ограничений для нужных сигналов системы.
Задаются неопределенные параметры системы, указываются их номинальные значения.
Процесс оптимизации системы инициализируется нажатием командой Start.
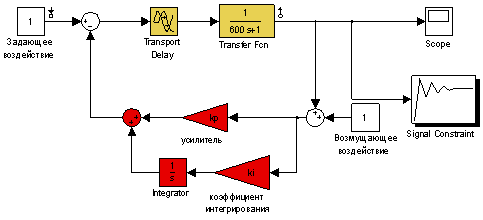
Рис.5. Структурная схема АСР, регулирования температурного режима обжига цементного клинкера с циклонным теплообменником, в Simulink.
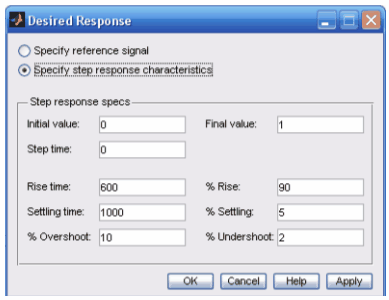
Рис. 6. Окно настройки параметров переходного процесса.
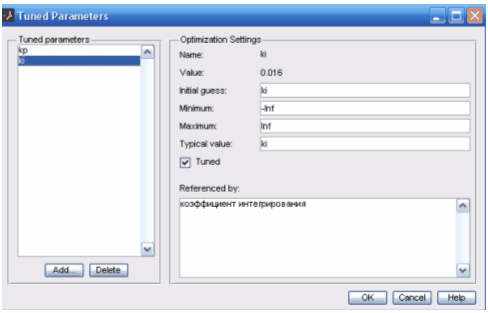
Рис. 7. Окно настройки параметров, подлежащих оптимизации.
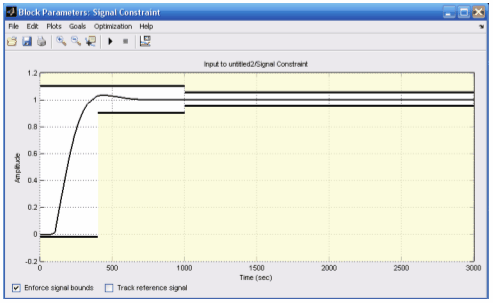
Рис. 8. Окно Signal Constant, процесс оптимизации параметров регулятора.
>> kp = 2.350
>> ki = 0.0160
4. Анализ динамических характеристик АСР при выбранном типе регулятора и найденных параметрах его настройки
Процесс оптимизации системы инициализируется нажатием командой Start.
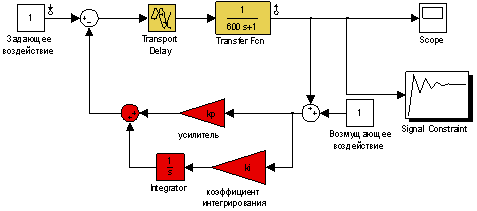
Рис. 9. Структурно-математическая схема АСР, регулирования температурного режима обжига цементного клинкера с циклонным теплообменником, в Simulink.
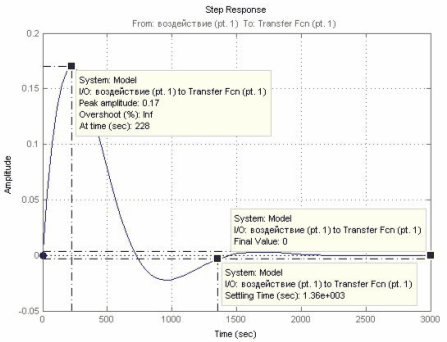
Рис. 10. Переходная характеристика системы по возмущению.
Из графика переходного процесса видно, что:
а) время регулирования tрег=1360 с;
б) статическая ошибка - 0
г) максимальная амплитуда 0,17
г) перерегулирование - Inf
Для определения запасов устойчивости по амплитуде и по фазе необходимо построить логарифмические амплитудную и фазовую характеристики (ЛАХ и ЛФХ). Для этого необходимо разомкнуть систему и по виду разомкнутой системы судить об устойчивости замкнутой.
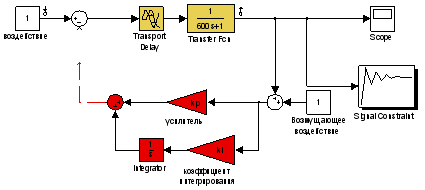
Рис. 11. Структурно-математическая схема АСР, регулирования температуры обжига цементного клинкера с разомкнутой обратной связью.
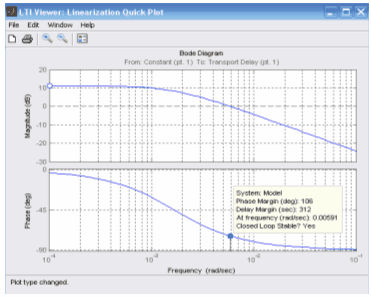
Рис. 12. ЛАХ и ЛФХ разомкнутой системы.
Из графика видно, что запас устойчивости по фазе - 106 градусов, система является устойчивой.
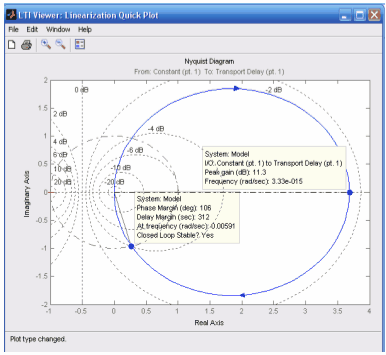
Рис. 13. АФЧХ разомкнутой системы
Из АФЧХ разомкнутой системы видно (рис.11), что годограф не охватывает точку с координатами (-1,j0) следовательно система устойчива в замкнутом состояние.
На основании полученных результатов можно сделать вывод, что регулятор и его параметры выбраны правильно и это обеспечивает требуемое качество регулирования.
5. Расчет одноконтурной цифровой АСР
Интенсивное развитие современных вычислительных средств привело к разработке и широкому использованию цифровых автоматических регуляторов и систем автоматического управления. Характерной их особенностью является квантование по времени и по уровню сигналов, поступающих в регулирующее устройство, обработка дискретной информации по запрограммированному алгоритму и преобразование квантованных регулирующих воздействий в кусочно-непрерывный сигнал для управления исполнительным механизмом.
|
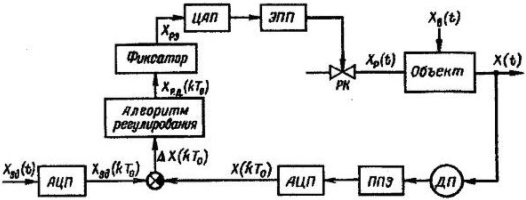
Рис. 14. Структурная схема одноконтурной цифровой АСР
Рассчитаем параметры дискретного регулятора по имеющимся значениям непрерывного регулятора:
Кр = 2.35
Ти = 60.
Такт квантования возьмем То=0,01*Тоб=0,01*100=1.0
То=1с.
Уравнение, описывающее динамику дискретного ПИ-регулятора:
Xp (k) =Xp (k-1) +q0ΔX (k) - q1ΔX (k-1)
Где k = k*To - дискретный аргумент.
По методу трапеций:
q0 = Kp * (1 + То / (2·Ти) = 2.35 * (1 + 1/ (2 * 60)) = 2.37
q1 = - Kp * (1 - То / (2·Ти) = - 2.35 * (1 - 1/ (2 * 60)) = - 2.33
Разностное уравнение, описывающий дискретный ПИ-регулятор:
![]()
6. Выбор технических средств автоматизации
6.1 Датчик температуры

Рис. 15. Термоэлектрические преобразователи 01.02
В качестве датчика температуры используется термоэлектрический преобразователь КТНН 01.02., разработанный российской компанией ООО ПК "Тесей". Данный датчик наиболее подходит для данной АСР температуры обжига цементного клинкера, т.к была необходима термопара с диапазоном температур от 0 до 1250 ºС. Кроме того этот датчик намного дешевле своих аналогов.
Предназначены для измерения температуры жидких, газообразных, сыпучих сред, а также поверхностей.
При установке на технологическом оборудовании сложной геометрии и труднодоступных местах допускается изгибать термопреобразователи по длине для размещения рабочего спая в требуемой зоне измерения (вплоть до сворачивания в петлю или спираль). Термопреобразователи выдерживает один цикл изгиба на угол 180° вокруг цилиндра диаметром, равным пятикратному диаметру кабеля d.
Термопреобразователи КТНН 01.02 диаметром 3 или 4.5 мм рекомендуется использовать в качестве контрольных при использовании ТП серии 21. ХХ с дополнительным каналом для бездемонтажной калибровки.
Рабочий спай термопреобразователей модификации 01.01 организован внутри кабеля со стороны рабочего торца, который заглушается металлической пробкой. С другого торца термопреобразователи оснащены клеммными головками или термопарными разъемами для подключения в измерительную цепь.
Термопреобразователи модификации 01.02-010 с клеммной головкой могут использоваться как самостоятельно, так и в качестве термочувствительных элементов (ТЭхх) для термопреобразователей в защитных чехлах.
Для термопреобразователей с диаметром кабельной части 0.5-3 мм используются мини-разъемы, для диаметров 3-6 мм - клеммные головки или стандартные разъемы.
Максимальный наружный диаметр компенсационного провода для мини-разъема - 4 мм, для стандартного разъема - 8 мм.
6.2 Регулятор температуры

Рис. 16. Регулятор МИНИТЕРМ 300
В качестве регулятора температуры был выбран автоматический регулятор МИНИТЕРМ 300, разработанный российской компанией ЗАО ТПА "ПРОМПРИБОР СЕРВИС".
Микропроцессорные регуляторы МИНИТЕРМ 300 предназначены для регулирования различных технологических параметров, например, температуры, давления, разрежения, уровня жидкости, расхода и т.п.
Применяются для автоматизации печей и сушильных камер; котлоагрегатов и систем теплоснабжения; водо- и воздухоподогревателей; климатических камер и кондиционеров; термостатов и стерилизаторов, установок для переработки пластмасс и пищевых продуктов, а также многих других процессов и установок. При этом во многих случаях используется программное регулирование (программный задатчик).
Основная отличительная особенность приборов - простота эксплуатации: оператор имеет доступ только к наблюдению за регулируемой величиной (например, температура в (C), изменению задания, ручному управлению и программному регулированию.
В модификации МИНИТЕРМ 300.21 термометры сопротивления подключаются непосредственно ко входу регулятора.
В модификации МИНИТЕРМ 300.31 термопары подключаются через устройство КХС-М, входящее в комплект регулятора и обеспечивающее компенсацию термо- Э.Д.С. холодных спаев.
Во всех модификациях сигналы постоянного тока 0-50 мВ подаются на входы регулятора непосредственно, а сигналы 0-10 В; 0-5 мА; 0 (4) - 20 мА - через устройства соответственно ВП10М; ВП05М; ВП20М. (В модификациях МИНИТЕРМ 300.31, МИНИТЕРМ 300.21 они поставляются по заказу потребителя).
В модификациях МИНИТЕРМ 300.21, МИНИТЕРМ 300.31 вместо одного из датчиков постоянного тока может подключаться реостатный (потенциометрический) датчик до 2,2 кОм.
В модификации МИНИТЕРМ 300.01 вместо трех датчиков постоянного тока могут подключаться реостатные (потенциометрические) датчики до 2,2 кОм.
Приборы МИНИТЕРМ 300.01, МИНИТЕРМ 300.21 и МИНИТЕРМ 300.31 заменяют приборы МИНИТЕРМ 300.0, МИНИТЕРМ 300.2, МИНИТЕРМ 300.3 соответственно.
Функциональные возможности:
ПИД, ПИ, ПД, П - регулирование с импульсным или аналоговым выходным сигналом, а также двухпозиционное регулирование;
возможность формирования программного задания в виде произвольной кусочно-линейной функции времени с четырьмя участками произвольного наклона (имеются специализированные модификации с другим количеством участков); логическое управление программным задатчиком (стоп, пуск, сброс);
возможность настраиваться автоматически на оптимальную динамику процессов регулирования перед включением в работу;
в импульсном регуляторе - возможность использования аналогового выхода в качестве сигнала, линейно зависящего от регулируемого параметра (например, для вывода на самописец);
защиту от обрыва цепи датчика (термопары, термометра сопротивления или датчика постоянного тока);
сигнализацию верхнего и нижнего предельных отклонений регулируемого параметра от заданного значения;
цифровую индикацию параметров в натуральных физических единицах или в процентах;
диагностику отказов регулятора.
Примечание. Градуировка термопары или термометра сопротивления, вид выхода и т.д. выбираются пользователем путем установки параметров регулятора.
6.3 Исполнительный механизм

Рис. 17. Клапан плавного регулирования SPC-2
В качестве исполнительного механизма был выбран клапан плавного регулирования, OOO "Альфа Лаваль",SPC-2 с электропневматическим приводом.
Регулирующие клапаны фирмы Альфа Лаваль - идеальный выбор, если требуется безупречное регулирование расхода или поддержание постоянного давления.
Применения:
SPC-2 - это клапан с плавной характеристикой, оборудованный электропневматическим приводом, отвечающий высоким санитарным требованиям и предназначенный для систем с трубопроводами из нержавеющей стали.
Клапан применяется для регулирования давления, расхода, температуры, уровня жидкости в емкости и т.п.
Принцип действия:
Клапан управляется дистанционно при помощи электрического сигнала и сжатого воздуха. По умолчанию поставляется нормально открытый клапан (NO), по заказу - нормально закрытый (NC). Электропневмопривод может быть легко перенастроен из нормально открытого в нормально закрытый.
IP-преобразователь, являющийся составной частью электропневмопривода, преобразует электрический сигнал в пневматический импульс. Гидравлические удары не оказывают влияния на преобразование сигнала. Пневматический импульс передается на встроенный позиционер, действие которого основано на компенсации приложенного давления усилием пружины. Благодаря этому положение поршня электропневмопривода прямо пропорционально входному сигналу. Выполняется индивидуальная регулировка нулевого положения штока и настройка привода на заданный диапазон входных сигналов.
Диапазон настройки выбирается путем установки соответствующей пружины.
Типовая конструкция:
Клапан состоит из корпуса, затвора, манжетного уплотнения, кожуха и внешнего электропневмопривода. Электропневмопривода с кожухом крепится к корпусу клапана при помощи clamp-соединения.
Существенным достоинством электропневмопривода является использование встроенных IP-преобразователя и позиционера. Все движущиеся части находятся под кожухом привода и защищены от загрязнения и механических повреждений. Привод имеет минимальное количество движущихся частей.
Заключение
Техническое перегружение и перевооружение, ускоренное внедрение новых интенсифицированных технологических процессов невозможно без использования современного высокопроизводительного оборудования комплексной автоматизации. Разработка и внедрение автоматизированных систем управления технологическими процессами на предприятиях промышленности позволяет решать задачи оперативного управления производством.
Характерной особенностью современного этапа автоматизации технологических процессов является то, что она опирается на революцию в электронно-вычислительной технике, на самый высокий уровень использования микропроцессорных технологий, а также на быстрое развитие робототехники и быстрых производственных систем.
В данной работе, была разработана функциональная схема АСР температуры обжига цементного клинкера с циклонным теплообменником. При выполнения практической части была определена передаточная функция объекта по виду экспериментальной и эквивалентной кривых, выбран ПИ-регулятор, подобраны его коэффициенты в среде MatLab и в частности в пакете Simulink, при этом установлено, что смоделированная система удовлетворяет заданным требованиям к устойчивости и заданным показателям качества.
Автоматизируя процесс обжига цементного клинкера с циклонным теплообменником, мы использовали современные средства измерения технических величин и управления ими, тем самым добились наблюдаемости основных технологических параметров производственного процесса и потенциальной управляемости производственного процесса в автоматическом режиме. Что позволяет человеку отстраниться от процесса управления при сохранении и увеличении производительности производства и росте качества выпускаемой продукции, что приведёт к желаемому экономическому эффекту.
Таким образом требования предъявляемые к курсовому проекту были выполнены.
Список используемой литературы
1. ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИЗАЦИИ: Методические указания по выполнению курсовых работ и учебно-методические материалы к самостоятельной работе и индивидуальным заданиям/С.Ф. Абдулин. - Омск: Из-во СибАДИ, 2005. - 84 с.
2. Абдулин С.Ф. Системы автоматики предприятий стройиндустрии: Учебное пособие - Омск: Изд-во СибАДИ, 2007. - 643 с.
3. Лисиенко В.Г., Шероков Я.М., Ладыгичев М.Г. Вращающиеся печи. Теплотехника, управление и экология: справочное издание в 2-х книгах, М.: Теплотехник, 2004 г.
4. Древицкий Е.Г. Повышение эффективности работы вращающихся печей. М., Стройиздат, 1990.
5. Силенок С.Г., Гризак Ю.С., Лямин В.Н. Печные агрегаты цементной промышленности. М.: Машиностроение, 1984.
6. Интернет ресурсы:
7. www.tesey.com;
8. www.asutp.ru;
9. www.ttc-nikai.ru;
10. www.procement.com;
11. www.kipinfo.ru;
12. www.exponenta.ru.
Список аппаратных и программных средств
Аппаратные средства:
IBM PC;
принтер HP Laser Jet 1018.
Программные средства:
Microsoft Windows XP Professional версия 2002 Service Pack 3;
Microsoft Office 2003;
MATLAB 7.6.0 (R2008a);
Компас 3-D V9;
Mozilla Firefox.
Приложение 1
| № |
Наименование параметра |
Номинальное значение параметра | Место установки ТСА |
Наименование и характеристики ТСА |
Тип ТСА | Кол-во | Завод-изготовитель |
| 1 | Температура |
12000С |
По месту | КТНН | Термоэлектрические преобразователи 01.02 | 5 | ООО ПК "Тесей" |
| 2 | Расход | - | На щите | Регулятор | Регулятор МИНИТЕРМ 300 | 1 | ЗАО ТПА "ПРОМПРИБОР СЕРВИС". |
| 3 | Диаметр условного прохода | 0,25 | По месту | Исполнительный механизм |
Клапан плавного регулирования SPC-2 |
2 | OOO "Альфа Лаваль" |