 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Проектирование привода цепного конвейера
Курсовая работа: Проектирование привода цепного конвейера
Оглавление
Задание
Введение
1. Описание назначения и устройства проектируемого привода.
2. Выбор электродвигателя и кинематический расчет.
3. Выбор материалов шестерен и колес и определение допускаемых напряжений.
4. Расчет второй ступени редуктора.
5. Расчет первой ступени редуктора.
6. Основные размеры корпуса и крышки редуктора.
7. Проектный расчет валов, подбор подшипников.
8. Расчет тихоходного вала и расчет подшипников для него.
9. Расчет промежуточного вала и расчет подшипников для него.
10. Расчет быстроходного вала и расчет подшипников для него.
11. Расчет тяговой звездочки.
12. Расчет приводного вала и расчет подшипников для него.
13. Смазка
14. Проверка прочности шпоночных соединений.
15. Выбор муфт
16. Сборка редуктора.
Список использованной литературы
Приложение: спецификация редуктора.
Вариант 12
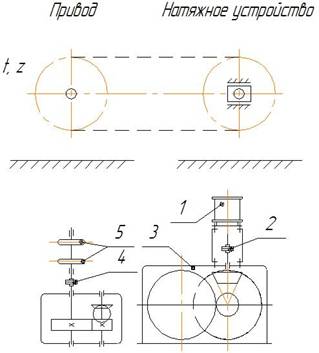
Спроектировать привод цепного сборочного конвейера, состоящий из электродвигателя фланцевого (1), муфты (2), редуктора коническо-цилиндрического (3), муфты (4), звездочек тяговых (5). Цепи по ГОСТ 588-64, тип ПВР. В одной из муфт предусмотреть предохранительное устройство.
Техническая характеристика привода:
Окружное усилие на звездочке Р, кг: 260.
Скорость цепи конвейера V, м/с: 1,5.
Число зубьев звездочки z: 9.
Шаг цепи t, мм: 100.
Ресурс tΣ, ч: 48000.
Введение
Редуктор является неотъемлемой составной частью современного оборудования. Разнообразие требований, предъявляемых к редукторам, предопределяет широкий ассортимент их типов, типоразмеров, конструктивных исполнений, передаточных отношений и схем сборки.
При выполнении проекта используются математические модели, базирующиеся на теоретических и экспериментальных исследованиях, относящихся к объемной и контактной прочности, материаловедению, теплотехнике, гидравлике, теории упругости, строительной механике. Широко используются сведения из курсов сопротивления материалов, теоретической механики, машиностроительного черчения и т. д. Все это способствует развитию самостоятельности и творческого подхода к поставленным проблемам.
При выборе типа редуктора для привода рабочего органа (устройства) необходимо учитывать множество факторов, важнейшими из которых являются: значение и характер изменения нагрузки, требуемая долговечность, надежность, КПД, масса и габаритные размеры, требования к уровню шума, стоимость изделия, эксплуатационные расходы.
Из всех видов передач зубчатые передачи имеют наименьшие габариты, массу, стоимость и потери на трение. Коэффициент потерь одной зубчатой пары при тщательном выполнении и надлежащей смазке не превышает обычно 0,01. Зубчатые передачи в сравнении с другими механическими передачами обладают большой надежностью в работе, постоянством передаточного отношения из-за отсутствия проскальзывания, возможностью применения в широком диапазоне скоростей и передаточных отношений. Эти свойства обеспечили большое распространение зубчатых передач; они применяются для мощностей, начиная от ничтожно малых (в приборах) до измеряемых десятками тысяч киловатт.
К недостаткам зубчатых передач могут быть отнесены требования высокой точности изготовления и шум при работе со значительными скоростями.
Одной из целей выполненного проекта является развитие инженерного мышления, в том числе умение использовать предшествующий опыт, моделировать используя аналоги. Для курсового проекта предпочтительны объекты, которые не только хорошо распространены и имеют большое практическое значение, но и не подвержены в обозримом будущем моральному старению.
Существуют различные типы механических передач: цилиндрические и конические, с прямыми зубьями и косозубые, гипоидные, червячные, глобоидные, одно- и многопоточные и т. д. Это рождает вопрос о выборе наиболее рационального варианта передачи. При выборе типа передачи руководствуются показателями, среди которых основными являются КПД, габаритные размеры, масса, плавность работы и вибронагруженность, технологические требования, предпочитаемое количество изделий.
При выборе типов передач, вида зацепления, механических характеристик материалов необходимо учитывать, что затраты на материалы составляют значительную часть стоимости изделия: в редукторах общего назначения - 85%, в дорожных машинах - 75%, в автомобилях - 10% и т. д.
Поиск путей снижения массы проектируемых объектов является важнейшей предпосылкой дальнейшего прогресса, необходимым условием сбережения природных ресурсов. Большая часть вырабатываемой в настоящее время энергии приходится на механические передачи, поэтому их КПД в известной степени определяет эксплуатационные расходы.
Наиболее полно требования снижения массы и габаритных размеров удовлетворяет привод с использованием электродвигателя и редуктора с внешним зацеплением.
1. Описание назначения и устройства проектируемого привода
Проектируемый привод предназначен для передачи вращательного движения от электродвигателя к приводному валу цепного сборочного конвейера. В состав данного привода входят:
1.Электродвигатель фланцевый.
2.Муфта.
3.Редуктор коническо-цилиндрический.
4.Муфта.
5.Звездочки тяговые.
Рассмотрим более подробно составные части привода. Вращательное движение от электродвигателя через муфту передается на быстроходный вал редуктора. Кроме передачи вращательного движения муфта также компенсирует несоосность вала двигателя и быстроходного вала редуктора. В качестве электродвигателя широкое применение получили асинхронные двигатели. В этих двигателях значительное изменение нагрузки вызывает несущественное изменение частоты вращения ротора.
Коническо-цилиндрический редуктор передает вращательное движение от двигателя к приводному валу, при этом изменяя угловую скорость и крутящий момент по величине и направлению. Изменение направления связано с наличием в редукторе конической передачи.
Еще одна муфта передает вращательное движение от тихоходного вала редуктора к приводному валу цепного сборочного конвейера. Кроме передачи вращательного движения муфта также компенсирует несоосность тихоходного вала редуктора и приводного вала конвейера. Предусмотрим в этой муфте предохранительное устройство для предотвращения поломки привода при заклинивании исполнительного элемента.
Звездочки тяговые установлены на приводном валу и приводят в движение цепи по ГОСТ 588-64, тип ПВР.
2. Выбор электродвигателя и кинематический расчет
Изобразим кинематическую схему привода на рис. 1. Расчет ведем по [1].
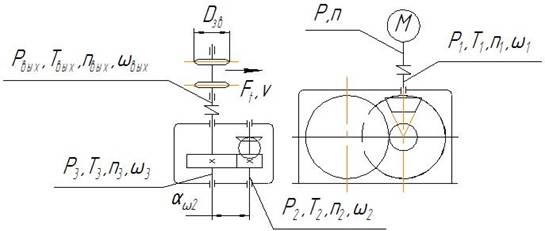
Рис.1
Потребляемая мощность привода:
Рвых = Ft · V = 2,6 · 103 · 1,5 = 3,9 кВт.
Требуемая мощность двигателя:
Рэ потр = Рвых/ ηобщ , где:
ηобщ = ηред · ηм2 · ηп - общий КПД привода.
ηред – КПД редуктора.
ηред = ηцп · ηкп · ηп3
По таблице 1.1 из [1]:
ηцп = 0,96…0,98; принимаем ηцп = 0,97 – КПД закрытой цилиндрической передачи;
ηкп = 0,95…0,97; принимаем ηкп = 0,96 – КПД закрытой конической передачи;
ηп = 0,99 – КПД пары подшипников качения.
ηм = 0,98 – КПД муфты.
ηред = 0,97 · 0,96 · 0,993 = 0,9
ηобщ = 0,9 · 0,982 · 0,99 = 0,86
Рэ потр = 3,9/ 0,86 = 4,53 кВт.
Частота вращения вала электродвигателя:
nэ = nвых · U1 · U2 , где:
U1 – передаточное число конической передачи;
U2 – передаточное число цилиндрической передачи.
По таблице 1.2 из [1] примем рекомендуемые значения передаточных чисел:
U1 = 2;
U2 = 3.
nвых = 60v / (πDзв) = 60 · 1,5 / (3,14 · 0, 287) = 99,9 об/мин
Dзв = zpзв / (π · 103) = 9 · 100 / (3,14 · 103) = 0,287 м
nэ = 99,9 · 2 · 3 = 599,4 об/мин
По таблице 24.8 [1] выбираем электродвигатель 132М8: Р = 5,5 кВт;
n = 720 об/мин.
Общее передаточное число привода:
Uобщ = Uред = n / nвых = 720/99,9 = 7,2
По таблице 1.3 [1]:
U1 = Uред / U2 = 7,2 / 2,95 = 2,44
U2 = 1,1![]() = 1,1
= 1,1![]() = 2,95
= 2,95
Частота вращения валов:
n1 = n = 720 об/мин;
n2 = n1 / U1 = 720 / 2,44 = 295,1 об/мин;
n3 = nвых = 99,9 об/мин.
Угловые скорости валов:
ω1 = πn1 / 30 = 3,14 · 720 / 30 = 75,4 рад/с;
ω2 = πn2 / 30 = 3,14 · 295,1 / 30 = 30,9 рад/с;
ω3= ωвых = πn3 / 30 = 3,14 · 99,9 / 30 = 10,5 рад/с.
Вращающие моменты на валах:
Твых = Т3 = Ft Dзв / 2 = 2,6 · 103 · 0,287 / 2 = 373 Н·м;
Т2 = Т3 / (ηцп · U2) = 373 / (0,97 · 2,95) = 130,4 Н·м;
Т1 = Т2 / (ηкп · U1) = 130,4 / (0,96 · 2,44) = 55,7 Н·м.
Мощности на валах:
Р1 = Р · ηм · ηп = 5,5 · 0,98 · 0,99 = 5,34 кВт;
Р2 = Р1 · ηкп · ηп = 5,34 · 0,96 · 0,99 = 5,08 кВт;
Р3 = Р2 · ηцп · ηп = 5,08 · 0,97 · 0,99 = 4,88 кВт;
Рвых = Р4 · ηм · ηп = 4,88 · 0,98 · 0,99 = 4,73 кВт.
3. Выбор материалов шестерен и колес и определение допускаемых напряжений
По таблице 2.1 [1] выбираем материалы колеса и шестерни.
Материал колес – сталь 45; термообработка – улучшение: 235…262 НВ2;
248,5 НВСР2; σв = 780 МПа; σт = 540 МПа; τ = 335 МПа.
Материал шестерен – сталь 45; термообработка – улучшение: 269…302 НВ1;
285,5 НВСР1; σв = 890 МПа; σт = 650 МПа; τ = 380 МПа.
Допускаемые контактные напряжения и напряжения изгиба для шестерни и колеса принимаем по таблице 2.2 [1]:
[σ]H1 = 1,8HBCP1 + 67 = 285,5 · 1,8 + 67 = 581 МПа
[σ]H2 = 1,8HBCP2 + 67 = 248,5 · 1,8 + 67 = 514 МПа
[σ]F1 = 1,03HBCP1 = 285,5 · 1,03 = 294 МПа
[σ]F2 = 1,03HBCP2 = 248,5 · 1,03 = 256 МПа
[σ]H1max = 2,8 σт = 2,8 · 650 = 1820 МПа
[σ]H2max = 2,8 σт = 2,8 · 540 = 1512 МПа
[σ]F1max = 2,74 HBCP1 = 2,74 · 285,5 = 782,3 МПа
[σ]F2max = 2,74 HBCP2 = 2,74 · 248,5 = 680,9 МПа
Для дальнейших расчетов принимаем: [σ]H = [σ]H2 = 514 МПа.
4. Расчет второй ступени редуктора
Исходные данные: U2 = 2,95; Т3 = 373 Н·м; n3 = 99,9 об/мин.
αw2 ≥ Кα(U2 + 1)  = 4950 · (2,95 + 1)
= 4950 · (2,95 + 1)  = 0,15642 м
= 0,15642 м
Кα = 4950 – для прямозубых передач [1].
КНβ = 1 – при постоянной нагрузке [1].
ψd = 0,5 ψα(U2 + 1) = 0,5 · 0,25 (2,95 + 1) = 0,49
Принимаем: ψα = 0,25 [1].
ТНЕ2 = КНД Т3 – эквивалентный момент на колесе, где:
КНД = КНЕ
![]() ≤ 1
≤ 1
Коэффициент эквивалентности:
КНЕ = 0,56 (таблица 2.4 [1])
NHG = (HBcp)3 = 248,53 = 1,53 · 107 – базовое число циклов нагружений.
КНД = 0,56 ·
![]() = 0,78
= 0,78
ТНЕ2 = 0,78 · 373 = 291 Н·м.
Принимаем межосевое расстояние по стандартному ряду: αw2 = 160 мм.
Предварительные основные размеры колеса:
d2 = 2 αw2 U2 / (U2 + 1) = 2 · 160 · 2,95 / (2,95 + 1) = 239 мм – делительный диаметр
b2 = ψα αw2 = 0,25 · 160 = 40 мм
Модуль передачи:
m ≥ ![]() =
= ![]() = 0,002 м
= 0,002 м
Km = 6,6 – для прямозубых колес [1].
ТFЕ2 = КFД Т3 – эквивалентный момент на колесе, где:
КFД = КFЕ ![]() ≤ 1
≤ 1
Коэффициент эквивалентности:
КFЕ = 0,68 (таблица 2.4 [1])
NFG = 4 · 106 – базовое число циклов нагружений.
КFД = 0,68 · ![]() =
1
=
1
ТFЕ2 = 1 · 373 = 373 Н·м.
Принимаем m = 2 мм.
Суммарное число зубьев:
zΣ = 2 αw2 / m = 2 · 160 / 2 = 160
Число зубьев шестерни и колеса:
z1 = zΣ / (U2 + 1) = 160 / (2,95 + 1) = 40
z2 = zΣ - z1 = 160 – 40 = 120
Фактическое передаточное число:
U2ф = z2 / z1 = 120/40 = 3
Отклонение от заданного передаточного числа: 1,6% < 4%
Делительные диаметры:
d1 = m z1 = 2 · 40 = 80 мм
d2 = 2 αw2 - d1= 2 · 160 - 80 = 240 мм
Диаметры окружности вершин и впадин зубьев:
da1 = d1 + 2(1 + х1 – у)m = 80 + 2 · 2 = 84 мм
df1 = d1 – 2(1,25 – х1)m = 80 – 2,5 · 2 = 75 мм
da2 = d2 + 2(1 + х2 –у)m = 240 + 2 · 2 = 244 мм
df2 = d2 – 2(1,25 – х2)m = 240 – 2,5 · 2 = 235 мм
x1 = x2 = 0; y = -(αw2 – α)/m = -(160 – 160)/2 = 0 – коэффициент воспринимаемого смещения.
α = 0,5m(z2 + z1) = 0,5 · 2 (120 + 40) = 160 – делительное межосевое расстояние
Размеры заготовок колес:
Dзаг = da2 + 6 = 244 + 6 = 250 мм > Dпред = 125 мм
Сзаг = 0,5b2 = 0,5 · 40 = 20 мм
Sзаг = 8m = 8 · 2 = 16 мм ≤ Sпред = 80 мм
Заменим материал колеса на сталь 40ХН, с термообработкой улучшением, с
Dпред = 315 мм
Усилия в зацеплении:
окружное: Ft1 = Ft2 = 2Т3 / d2 = 2 · 373 / 0,24 = 3108 H
радиальное: Fr1 = Fr2 = Ft1 · tgα = 3108 · tg 20° = 1131 H
Расчетное напряжение изгиба в зубьях колеса:
σF2 = FtЕ · КFα · КFβ · KFV · Yβ · YF2 / b2 · m ≤ [σ]F2
в зубьях шестерни:
σF1 = σF2 YF1 / YF2 ≤ [σ]F1
КFα = 1 – для прямозубых колес. [1]
КFβ = 1 – при постоянной нагрузке. [1]
Окружная скорость в зацеплении:
V = ![]() = 3,14 · 0,24 · 99,9 / 60 = 1,3 м/с
= 3,14 · 0,24 · 99,9 / 60 = 1,3 м/с
Назначим 9 степень точности изготовления зубьев, табл. 2.5 [1].
KFV = 1,13 – коэффициент динамической нагрузки, табл. 2.7 [1].
Yβ = 1 - β°/140 = 1
Коэффициент формы зуба: YF1 = 3,7, YF2 = 3,6, табл. 2.8 [1].
FtЕ = КFД Ft = 3108 Н – эквивалентная окружная сила.
σF2 = 3108 · 1 · 1 · 1,13 · 1 · 3,6 / 0,04 · 0,002 = 158 МПа ≤ [σ]F2 = 256 МПа
σF1 = 158 · 3,7 / 3,6 = 162 ≤ [σ]F1 = 294 МПа
Условие выполняется.
Проверочный расчет зубьев по контактному напряжению:
σН2 = ![]()
КН = 3,2 · 105 – для прямозубых колес [1]
КНα = 1; КНβ = 1 [1]; КНV = 1,05 табл. 2.9 [1].
σН2 = ![]()
 = 465 МПа ≤ [σ]Н = 514 МПа
= 465 МПа ≤ [σ]Н = 514 МПа
Условие выполняется.
5. Расчет первой ступени редуктора
Исходные данные: U1 = 2,44; Т2 = 130,4 Н·м; n2 = 295,1 об/мин.
Диаметр внешней делительной окружности колеса [1]:
de2 ≥ 1,75 · 104  = 1,75 · 104
= 1,75 · 104  = 0,224 м
= 0,224 м
νН = 0,85 – для прямозубых колес [1].
КНβ = КНβ0 = 1,9 - табл. 2.3 [1].
Ψd = 0,166![]() = 0,166
= 0,166![]() = 0,44
= 0,44
ТНЕ2 = КНД Т2 = 0,78 · 130,4 = 101,7 Н·м
Угол делительного конуса колеса:
δ2 = arctg(U1) = arctg 2,44 = 67,7º; sinδ2 = sin 67,7 = 0,93
Конусное расстояние:
Re = de2 / 2sin(δ2) = 224 / 2 · 0,93 = 120,4 мм
Ширина зубчатого венца шестерни и колеса:
b = 0,285Re = 0,285 · 120,4 = 34,3 мм
Внешний торцовый модуль:
me ≥ ![]()
KFβ = KFβ0(1 - Х) + Х = 1,67 (1 – 0,5) + 1 = 1,835
KFβ0 = 1,67 – табл. 2.6 [1].
X = 0,5 [1].
vF = 0,85 – для прямозубых колес,
ТFЕ2 = КFД Т2 = 1 · 130,4 = 130,4 Н·м
me = ![]() = 0,002 м
= 0,002 м
Число зубьев колеса и шестерни:
z2 = de2 / me = 224 / 2 = 112
z1 = z2 / U1 = 112 / 2,44 = 46
Фактическое передаточное число:
U1ф = z2 / z1 = 112/46 = 2,43
Отклонение от заданного передаточного числа: 0,4% < 4%
Определим окончательные размеры колес.
Углы делительных конусов колеса и шестерни.
δ2 = arctg(U1) = arctg 2,43 = 67,6º; δ1 = 90º - δ2 = 22,4º
cos δ2 = cos 67,6º = 0,38; cos δ1 = cos 22,4º = 0,92; sin δ1 = ; sin 22,4° = 0,38.
Делительные диаметры:
de1 = me z1 = 2 · 46 = 92 мм;
de2 = me z2 = 2 · 112 = 224 мм.
Внешние диаметры:
dae1 = de1 + 2(1 + Xe1) me cosδ1 = 92 + 2(1+0,22) 2 · 0,92 = 96,5 мм
dae2 = de2 + 2(1 + Xe2) me cosδ2 = 224 + 2(1 – 0,22) 2 · 0,38 = 225,2 мм
Xe1 = 0,22; Xe2 = - Xe1 = -0,22 – коэффициенты смещения, табл. 2.10 [1].
Размеры заготовок колес:
Dзаг = dе2 + 2m + 6 = 224 + 2 · 2 + 6 = 234 мм > Dпред = 125 мм
Sзаг = 8me = 8 · 2 = 16 мм ≤ Sпред = 80 мм
Заменим материал колеса на сталь 40ХН, с термообработкой улучшением, с Dпред = 315 мм
Силы в зацеплении:
Ft = ![]() =
= ![]() = 1358 H – окружная сила в зацеплении.
= 1358 H – окружная сила в зацеплении.
dm2 = 0,857 de2 = 0,857 · 224 = 192 мм
Fr1 = Fa2 = Ft · tgα · cos δ1 = 1358 · tg 20º · 0,92 = 455 H
Fa1 = Fr2 = Ft · tgα · sin δ1 = 1358 · tg 20º · 0,38 = 188 H
Напряжения изгиба в зубьях колеса.
σF2 = 1,17YF2 ![]() KFβ KFv ≤ [σ]F2
KFβ KFv ≤ [σ]F2
Напряжения изгиба в зубьях шестерни.
σF1 = σF2 YF1 / YF2 ≤ [σ]F1
KFβ = 1,835
Окружная скорость в зацеплении:
V = ![]() = 3,14 · 0,192 · 295,1 / 60 = 2,97
м/с
= 3,14 · 0,192 · 295,1 / 60 = 2,97
м/с
KFv = 1,5 – табл. 2.7 [1].
Эквивалентные числа зубьев:
zv2 = z2 / cos δ2 = 112 / 0,38 = 294,7
zv1 = z1 / cos δ1 = 46 / 0,92 = 50
YF1 = 3,57, YF2 = 3,62 – табл. 2.8 [1].
σF2 = 1,17 · 3,62 ![]() 1,835 · 1,5 = 232 МПа ≤ [σ]F2 = 256 МПа
1,835 · 1,5 = 232 МПа ≤ [σ]F2 = 256 МПа
σF1 = 232 · 3,57 / 3,62 = 229 МПа ≤ [σ]F1 = 294 МПа
Условие выполняется.
Расчетное контактное напряжение:
σН = 1,9
· 106 ≤ [σ]H,
≤ [σ]H,
КНv = 1,2 – табл. 2.9 [1].
ТНЕ2 = КНД Т2 = 0,78 · 130,4 = 101,7 Н·м
σН = 1,9
· 106![]() = 462 МПа ≤
[σ]H = 514 МПа,
= 462 МПа ≤
[σ]H = 514 МПа,
Условие выполняется.
6. Основные размеры корпуса и крышки редуктора
По рекомендациям [1] в качестве материала корпуса выбираем:
СЧ15 ГОСТ 1412-85.
Толщина стенки корпуса:
δ = 2,6![]() ≥ 6 мм
≥ 6 мм
δ = 2,6![]() = 6,4 мм
= 6,4 мм
Принимаем: δ = 6,7 мм – табл. 24.1 [1].
Толщина стенки крышки корпуса: δ1 = 0,9δ = 0,9 · 6,7 = 6,03
Принимаем: δ1 = 6 мм – табл. 24.1 [1].
Толщина поясов стыка:
b = 1,5δ = 1,5 · 6,7 = 10,05 мм; b1 = 1,5δ1 = 1,5 · 6 = 9 мм
Принимаем: b = 10 мм; b1 = 9 мм – табл. 24.1 [1].
Размеры конструктивных элементов из [1]:
f = (0,4…0,5) δ1 = (0,4…0,5) · 6 = 2,4…3 мм; f = 3 мм.
l = (2…2,2) δ = (2…2,2) · 6,7 = 13,4…14,74 мм; l = 14 мм.
Из [1] в зависимости от межосевого расстояния тихоходной ступени определяем диаметры болтов крепления крышки редуктора и отверстия под них:
Болт: М12; d0 = 13 мм.
Ширина фланца корпуса и крышки:
К = 2,7d = 2,7 · 12 = 32,4 мм; К = 32 мм – табл. 24.1 [1].
К1 = 2,2d = 2,2 · 12 = 26,4 мм; К = 26 мм – табл. 24.1 [1].
Диаметры штифтов:
dшт = (0,7…0,8)d = (0,7…0,8) · 12 = 8,4…9,6 мм; dшт = 10 мм
Диаметры болтов крепления корпуса редуктора на раме:
dк = ![]() ≥ 12 мм
≥ 12 мм
dк = ![]() = 9,06 мм; берем: М12
= 9,06 мм; берем: М12
Толщина фланца крепления редуктора на раму:
g = 1,5 dк = 1,5 · 12 = 18 мм.
Диаметр болтов крепления крышек подшипников:
dп = (0,7…0,75)dк = (0,7…0,75) · 12 = 8,4…9 мм; берем М10.
Страницы: 1, 2
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |