 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Разработка системы управления аппарата по розливу воды в стаканчики
Курсовая работа: Разработка системы управления аппарата по розливу воды в стаканчики
Реферат
Курсовой проект содержит 35 страниц, 10 рисунков, 7 таблиц, 49 литературных источников.
ПЛАТФОРМА, ШАГОВЫЙ МОТОР, СТАКАНЧИК, НАСОС, СХЕМОТЕХНИКА, МИКРОКОНТРОЛЛЕР
Объект работы: Аппарат по розливу воды в стаканчики
Цель работы: Разработка системы управления аппарата по розливу воды в стаканчики
В данной курсовой работе проводится описание поэтапной разработки аппарата по розливу воды в стаканчики. Работа включает в себя разработку структурной схемы системы, выбор элементной базы, с описанием отдельных элементов системы, в том числе микроконтроллера. На основе выбранных элементов происходит построение функциональной схемы системы. Проводится разработка алгоритма работы системы и программного кода. В результате получили систему управления аппарата по розливу воды в стаканчики.
Содержание
Введение
1. Анализ задачи
1.1 Принцип работы
1.2 Платформа
1.3 Проверка уровня воды в баке
1.4 Наполнение стаканчика водой
1.5 Условия работы
2. Выбор и обоснование элементной базы
2.1 Электромотор
2.2 Водяной насос
2.3 Электромагнитное реле
2.4 Микроконтроллер
3. Разработка функциональной схемы
3.1 Источник питания
3.2 Микроконтроллер
3.3 Тактовый генератор
3.4 Проверка уровня воды
3.5 Индикатор уровня воды
3.6 Схема управления шаговым двигателем
3.7 Схема управления насосом
4. Алгоритм работы
4.1 Описание блок схемы
4.2 Описание хода разработки программного обеспечения
Заключение
Список использованных источников
Приложения
Введение
Курсовой проект по курсу «Микропроцессорные средства» ставит задачей познакомить с азами проектирования устройств, с применением микроконтроллера и написания для него программного обеспечения.
В этой пояснительной записке приводится описание процесса конструирования аппарата по розливу воды в стаканчики. Данный аппарат содержит микроконтроллер с программой, мотор для закачки воды, установка для подачи стаканчиков.
Проведено описание работы, которая была проведена в ходе конструирования, электронная схема аппарата, в которой показано взаимодействие с остальными исполнительными устройствами, описан ход конструирования схемы.
Написание программного обеспечения является одной из основных частей проекта. Приводится блок-схема алгоритма программы, описан ход написания.
К записке прилагаются плакаты с изображением электронной схемы и с блок-схемой алгоритма микропрограммы.
Проведем анализ поставленной задачи.[1-7] Данный аппарат состоит из множества частей, помимо системы управления на электронной плате, устройство имеет движущийся поднос с шестью стаканчиками, электромотор, приводящий его в движение, закрытый бак для воды на 2 литра, трубки для налива воды, насос, с помощью которого качается вода; запускать аппарат будем кнопкой «ПУСК». Примерная схема аппарата приведена на рисунке 1.1.
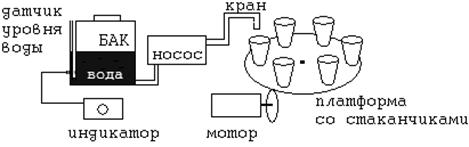
Рисунок 1.1 – Схема аппарата по розливу воды в стаканчики
1.1 Принцип работы
Пользователь устанавливает на поднос пустые стаканчики, включает аппарат, при этом начинает светить красный индикатор. Включает питание насоса. И для запуска аппарата нажимает на кнопку «ПУСК». Если уровень воды недостаточен, начнет мигать зеленый индикатор и необходимо долить воды в бак. Если воды достаточно, платформа начнёт движение и передвинет стаканчик под кран; далее аппарат наполнит стаканчик водой и после некоторой паузы передвинет платформу, чтобы наполнить следующий стаканчик и так далее, пока все они не будут заполнены. После окончания работы пользователь выключает аппарат.
1.2 Платформа
Необходимо заметить, что стаканчики стоят на подвижном подносе. Если резко начать вращение подноса, то пустые стаканчики вероятнее всего опрокинутся. Очевидно, что для стаканчика уже наполненного водой коэффициент трения о поднос будет выше, так как его масса будет больше. Поэтому при расчете скорости вращения подноса будем опираться на массу пустого стаканчика. Поднос будет вращаться с некоторой скоростью, заданной эмпирическим путём с помощью электродвигателя, установленного в нижней части подноса.
При плавном ускорении и плавном замедлении стаканчики сохранят устойчивость на подносе, и будут двигаться до целевого положения за меньшее время. Для достижения такого движения воспользуемся шаговым мотором. Будем постепенно раскручивать ротор шагового мотора под управлением программы, чтобы с помощью него повернуть платформу на необходимый угол.
Будем считать, что первый стаканчик уже находится под краном, и при повороте на угол 30° под краном будет стоять второй стаканчик, это позволит избежать ошибки «начального положения».
Когда стаканчики установлены под краном, наливается необходимое количество воды, при этом сначала проверяется, есть ли вода в баке.
1.3 Проверка уровня воды в баке
Чтобы проверить уровень воды в баке воспользуемся оптическим датчиком. Минимальный уровень, соответствует объёму воды необходимого для одного стаканчика (200 мл). Максимальный объём воды ограничен только ёмкостью бака (2 л).
Уровень воды проверяется с помощью светодиода и фотодиода, который установлен на трубке на уровне минимального объёма воды. Трубка присоединена к баку. В этой трубке находиться легкий поплавок, когда уровень воды мал, он перекрывает фотодиод и тем самым информирует о недостаточном объёме воды. Поплавок сделан так, чтобы перекрывать фотодиод даже когда в баке вода отсутствует.
Если уровень воды не достаточен, то необходимо проинформировать пользователя об этом факте. Будем делать это с помощью диода, который будет светить, когда вода есть, и мигать когда воды – нет.
Бак и стаканчики изготовлены из пищевой пластмассы, бак закрытый и герметичный.
1.3 Наполнение стаканчика водой
Вода льётся из тонкого шланга присоединённого через насос к баку с водой. Когда стаканчик под краном, насос начинает качать воду некоторое время (установленное эмпирическим путём), чтобы в стаканчике оказалось необходимое количество воды (200 мл). Насос подключается отдельно, имеет свое питание и включается помощью низковольтного реле.
Условия роботы будут нормальными, то есть аппарат работает в среде с комнатной температуры, нормальным давлением и влажностью. Установлен аппарат на горизонтальной поверхности на нулевом уровне моря. Работает от бытовой электрической сети 220 В.
2. Выбор и обоснование элементной базы
При осуществлении конструирования аппарата, выделим основные компоненты, необходимые для реализации задачи:
а) электромотор, для вращения подноса со стаканчиками;
б) водяной насос, с помощью которого нальём воды;
в) электромагнитное реле;
г) микроконтроллер, который будет управлять работой аппарата.
Замечание
При поиске элементов, использовалась глобальная сеть Internet. К сожалению, большинство сайтов предлагают данные товары китайского и тайваньского производства. Наиболее популярные сайты:
а) http://chinasuppliers.alibaba.com
б) http://www.made-in-china.com
2.1 Электромотор
Воспользуемся шаговым мотором.[8-17] Они позволяют на заданном шаге вращать ротор в нужное положение, благодаря подаче сигнала на ту или иную катушку возбуждения.
В зависимости от угла, который мы хотим получить необходимо, задать количество шагов.
Изучив характеристики шаговых моторов, предлагаемые как нашими производителями, так и зарубежными, я пришёл к выводу воспользоваться шаговым мотором российского производства НПФ «Электроприбор»[13]; рассмотрим серии FL20STH и FL28STH (рисунок 2.1).

Рисунок 2.1 – Вид шагового мотора серии FL20STH (справа), FL28STH (слева)
Таблица 2.1 – Технические характеристики моторов
| Величина полного шага, град | 1,8 |
| Погрешность углового шага, град | ±0,09 |
| Погрешность сопротивления обмоток двигателя, % | 10 |
| Погрешность индуктивности обмоток двигателя, % | 20 |
| Максимальное радиальное биение вала двигателя, мм | 0,02 |
| Максимальное осевое биение вала двигателя, мм | 0,08 |
| Максимальная допустимая осевая нагрузка на валу, Н | 10 |
| Максимальная допустимая радиальная нагрузка на валу, Н | 28 |
|
Температурный диапазон эксплуатации от минус 20oС до плюс 50oС |
|
Таблица 2.2 – Технические характеристики моторов
| Наименование | Рабочий ток/ фаза | Крутящий момент | Момент инерции ротора | Вес |
| А | кг*см |
г*cм2 |
кг | |
| FL20STH30-0604A | 0,6 | 0,18 | 0,2 | 0,06 |
| FL28STH32-0956A | 0,95 | 0,43 | 0,9 | 0,11 |
| FL28STH45-0956A | 0,95 | 0,75 | 1,2 | 0,14 |
| FL28STH51-0956A | 0,95 | 0,9 | 1,8 | 0,2 |
| FL28STH51-0674A | 0,67 | 1,2 | 1,8 | 0,2 |
Согласно приведенным техническим характеристикам (таблица 2.1 и таблица 2.2), воспользуемся мотором FL28STH32-0956A, который потребляет приемлемый ток, легок и достаточно дешев.
2.2 Водяной насос
Выберем, обычный небольшой водяной насос [8, 9, 12, 18, 19, 20], с помощью шлангов будем закачивать воду в стаканчики. Рассмотрим несколько моделей насосов.

Рисунок 2.2 – Вид насоса модели 2013
Таблица 2.3 – Технические характеристики насосов
| Модель | Выход (ватт) |
Диаметр выхода (мм) |
Вольтаж |
Макс. способность (Л/мин) |
Макс. давление (M) |
Габариты (L*W*H)(мм) | Масса (кг) |
| 1207 | 7/12 | 13 | 50Гц или 60Гц 100/120В 200/220В | 8/10 | 0.9/1.0 | 75*62*95 | 0.85 |
| 2013 | 9/14 | 13 | 11/14 | 1.3/1.6 | 80*67*105 | 0.95 | |
| 3025 | 14/20 | 24 | 15/18 | 1.8/2.2 | 85*70*135 | 1.40 |
Согласно техническим характеристикам насосов (таблица 2.3), будем брать насос модели 2013 14 Вт (см. рисунок 2.2), который подходит по габаритам и массе.
ИНТЕРЕСНОЕ
© 2009 Все права защищены. |