 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Курсовая работа: Автоматическая система управления приточно-вытяжной вентиляции
Реализация ПИ и ПИД – регуляторов требует выполнения специальных вычислительных операций, которые могут быть осуществлены или аппаратно (аналоговые устройства на основе операционных усилителей), или программно (цифровые вычислительные устройства). Для регулирования основных технологических параметров СКВ (температура, влажность и т. п.) существует большой ассортимент как непрерывных, так и цифровых одно- и многоканальных регуляторов.
В таблице 2 приведены рекомендации по выбору закона регулирования и типа регулятора, исходя из величины отношения запаздывания τd к постоянной времени объекта Т.
Таблица 2 – Выбор закона регулирования и типа регулятора
|
Соотношение τd /Т |
Характеристика объекта |
Закон регулирования и тип регулятора |
|
|
по запаздыванию и инерционности |
по степени регулируемости |
||
| 0<τd /Т<0,05 | Без запаздывания |
Очень хорошо регулируемый |
Релейный, непрерывный П-, ПИ-, ПД-, ПИД-регулятор |
| 0,05<τd /Т<0,1 |
С большой инерцион- ностью и с малым запаздыванием |
Очень хорошо регулируемый |
Релейный, непрерывный П-, ПИ-, ПД-, ПИД-регулятор |
| 0,1<τd /Т<0,2 |
С существенным транспортным запаздыванием |
Хорошо регулируемый |
Релейный, непрерывный П-, ПИ-, ПД-, ПИД-регулятор |
| 0,2<τd /Т<0,4 |
С существенным транспортным запаздыванием |
Еще регулируемый |
Непрерывный или цифровой ПИ-, ПД-, ПИД-регулятор |
| 0,4<τd /Т<0,8 |
С существенным транспортным запаздыванием |
Трудно регулируемый |
Непрерывный или цифровой ПИ-, ПД-, ПИД-регулятор |
| 0,8<τd /Т<1 |
С большим транспортным запаздыванием |
Очень трудно регулируемый |
Непрерывный или цифровой ПИ-, ПД-, ПИД-регулятор |
| τd /Т>1 |
С большим транспортным запаздыванием |
Очень трудно регулируемый |
Цифровой регулятор с упредителем |
Исходя из таблицы 2 можно заключить, что наш объект без запаздывания и очень хорошо регулируемый. В качестве регулятора может быть использован релейный, непрерывный П-, ПИ-, ПД- или ПИД-регулятор.
Для подбора параметров регулятора воспользуемся функцией подбора регулятора в программе Matlab. Собрав модель схемы регулирования, показанную на рисунке 7 и задавшись в блоке Signal Constraint выбранным типом переходного процесса, получаем параметры настройки регулятора Kd=-94.7979, Ki=39.9194, Kp= 271.2686.
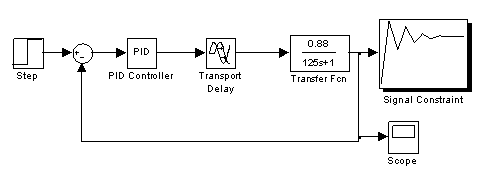
Рисунок 7 – Модель схемы регулирования
8. Исследование устойчивости системы автоматического регулирования
Для исследования устойчивости системы, предварительно разомкнув ее по главной обратной связи, построим годограф Найквиста (рисунок 8).
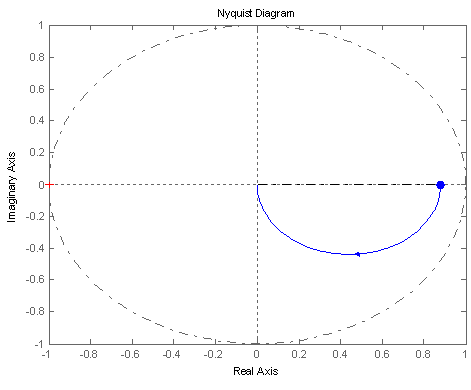
Рисунок 8 – Годограф Найквиста
По критерию Найквиста замкнутая система является устойчивой, так как ее амплитудно-фазная частотная характеристика не охватывает точку с координатами [-1;j0], и обладает бесконечными запасами устойчивости по амплитуде и по фазе.
9. Исследование переходных процессов
Линеаризировав систему и построив реакцию системы на единичный скачок, определим показатели качества системы управления. График полученной переходной характеристики и показатели качества изображены на рисунке 9.
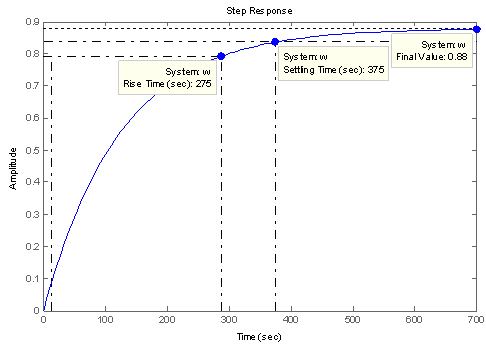
Рисунок 9 – График переходной характеристики
Таким образом, ПИД
регулятор с выбранными настройками обеспечивает следующие показатели: время
регулирования tрег=375с, время
нарастания tн=275с. Установившееся
значение выходной величины (![]() )
совпадает с заданной величиной, поэтому установившаяся ошибка
)
совпадает с заданной величиной, поэтому установившаяся ошибка ![]() , а значит, система
является астатической, относительно скачка задания
, а значит, система
является астатической, относительно скачка задания ![]() .
.
10. Составление спецификации на приборы и аппараты
Средства автоматизации, с помощью которых осуществляется управление процессом, должны быть выбраны технически грамотно и экономически обоснованно. При выборе средств автоматизации в первую очередь принимают во внимание следующие факторы:
- взрыво- и пожароопасность объекта (повышенное давление 0,6 МПа);
- агрессивность среды;
- число параметров, участвующих в управлении, и их физические и химические свойства;
- требования к качеству контроля и регулирования;
- уровень температур;
- расстояние между технологическим объектом и щитом управления (сравнительно не велико);
- точность используемых средств измерения (электрические вторичные приборы более точные).
Исполнительные механизмы, воздуховоды и датчики, используемые в схеме автоматизации отображены в спецификации.
10.1 Регулятор ТРМ12
ТРМ12 – измеритель ПИД-регулятор для управления задвижками и трехходовыми клапанами фирмы ОВЕН. Рекомендуется для управления клапанами и задвижками с электроприводом по температуре теплоносителя. Выполняет следующие функции:
А) Измерение температуры или другой физической величины (давления, влажности, расхода, уровня и т.п.) с помощью:
- термопреобразователей сопротивления типа ТСМ и ТСП 50/100, Pt100;
- термопары ТХК, ТХА, ТНН, ТЖК, ТПП(S), ТПП(R);
- датчика с унифицированным выходным сигналом тока 0(4)…20мА, 0…5мА или напряжения 0…1В
Б) Управление электромеханическим приводом запорно-регулирующего или
трехходового клапана
В) Программирование кнопками на лицевой панели прибора
Г) Сохранение заданных параметров при отключении питания
Д) Защита параметров от несанкционированных изменений.
Технические характеристики регулятора ТРМ12 представлены в таблице 3.
Таблица 3 – Технические характеристики
| Номинальное напряжение питания | 220В 50Гц |
| Допустимое отклонение номинального напряжения | -15…+10% |
| Предел допустимой основной погрешности измерения входного параметра (без учета погрешности датчика) | ±0,5% |
| Максимально допустимый ток источника питания | 50мА |
| Количество входов для подключения датчиков | 1 |
10.2 Измерение температуры
Термопреобразователи предназначены для непрерывного измерения температуры различных рабочих сред (пар, газ, вода, сыпучие материалы, химические реагенты и т.п.) не агрессивных к материалу корпуса датчика. В системе в качестве датчиков температуры установлено два термоэлектрических преобразователя (ТП) типа дТПL(ХК) и дТПК(ХА). ТП представляют собой термоэлектрическую цепь (термопару), образованную двумя разнородными металлическими проводниками с двумя спаями:
- измерительный спай («рабочий») – подверженный воздействию температуры рабочей среды;
- соединительный спай («холодный») – подверженный воздействию температуры в месте присоединения к измерительному прибору.
Диапазоны измерений ТП типа дТПК(ХА) и дТПL(ХК) составляют -40…375°С и -40…300°С, а допустимые отклонения ±1,5°С и ±2,5°С соответственно.
10.3 Измерение давления
Также в системе установлен преобразователь избыточного давления ОВЕН ПД100-ДИ, который:
- измеряет избыточное давление нейтральных к титану и нержавеющей стали сред, а также измерение перепада давления;
- преобразование избыточного давления в унифицированный сигнал постоянного тока 4…20мА;
- предел допустимой основной погрешности ±0,5% или ±1,0%;
- высокая перегрузочная способность по давлению;
- хорошие показатели временной стабильности выходного сигнала.
10.4 Устройства контроля и защиты
В системе используется устройство управления и защиты электропривода задвижки без применения концевых выключателей ОВЕН ПКП1. Осуществляет следующие функции:
- автоматическая остановка электропривода при достижении задвижкой крайнего положения без применения концевых выключателей;
- выключение управления приводом с выдачей сигнала «Авария» при заклинивании задвижек или проскальзывании механизмов электропривода и т.д.
автоматическая система управление вентиляция
11. Разработка и описание функциональной и электрической принципиальной схемы
Принципиальные электрические схемы автоматизации являются проектными документами, расшифровывающими принцип действия и работы узлов, устройств и систем автоматизации, работающих от источника электрической энергии.
Принципиальные электрические схемы автоматизации при помощи показанных на схемах условных графических, буквенных и цифровых изображений и обозначений, дают представление о последовательности работы применяемой электрической аппаратуры и элементов для достижения поставленных задач для упомянутых узлов, устройств и систем.
Принципиальные электрические схемы автоматизации разрабатываются для управления агрегатами, для регулирования технологических процессов, блокировок по технологическим параметрам, аварийной защиты производственных и технологических процессов и предупредительной и аварийной сигнализации.
Данные схемы являются основными чертежами для разработки рабочих монтажных чертежей и проведения пусконаладочных работ и квалифицированной эксплуатации этих узлов, устройств и систем электрического принципа действия. Названия принципиальным электрическим схемам присваиваются в соответствии с функциональным принципом действия запроектированной системы.
При выполнении принципиальных электрических схем используются развернутые изображения элементов.
Схема управления вентиляционной установки состоит из вентиляторов В1 и В2 с приводными асинхронными двигателями с короткозамкнутым ротором М1-М4, предназначенной для проветривания помещений и поддержания при этом заданной температуры. Эти требования осуществляются ступенчатым регулированием угловой скорости двигателей путем изменения напряжения статора с помощью автотрансформатора AT, а также выбором количества находящихся в работе вентиляторов. Схема обеспечивает ручное и автоматическое управление вентиляторами; выбор режима работы осуществляется переключателем УП.
Ручное управление имеет место при переводе рукоятки УП в положение «+45°», при этом подготавливаются к включению цепи катушек контакторов КЛ, К1-К4. Двигатели вентиляторов по питанию разделены на две группы:
- первая группа (М1 и М2) подключена к шинам на вторичной стороне AT постоянно;
- вторая группа М3 и М4 присоединяется к шинам AT и включается в работу (при ручном управлении) переводом рукоятки переключателя ПК2 в положение 2, при котором срабатывает контактор К4.
Заключение
В данном курсовом проекте была построена автоматическая система управления приточно-вытяжной вентиляции. Система вентиляции работает следующим образом: всасывает свежий воздух из окружающей среды и циркуляционный воздух из проветриваемого помещения. Количество циркуляционного воздуха можно установить в пределах 0-100%. Кроме того, воздух нагревается и фильтруется. Двухступенчатое фильтрование обеспечивает не только захват частиц, рассеянных в воздухе, но также частично улавливает запах. Обработанный воздух выдувается в помещение. В задней части установки находится всасывающий патрубок для свежего воздуха, а в нижней – решетка для рециркуляционного воздуха. Соотношение перемешивания можно регулировать с помощью механического смесительного клапана.
Применение современных средств контроля, исполнительных механизмов и быстродействующих надежных регуляторов ТРМ12 позволяют сделать систему вентиляции надежной и экономичной, а системы сигнализации и блокировки обеспечивают ее безопасность.
Список использованных источников
1. Бондарь Е.С. и др. Автоматизация систем вентиляции и кондиционирования воздуха // К.: «Аванпост-Прим», – 2005.
2. СНиП 3.05.07-85 Системы автоматизации.
3. СНиП 2.04.05-91 Отопление, вентиляция и кондиционирование.
4. Солодовников В.В. и др., Основы теории и элементы систем автоматического регулирования. Учебное пособие для вузов. – М.: Машиностроение, 1985.
5. Гордиенко А.С., Сидельник А.Б., Цибульник А.А., Микропроцессорные контроллеры для систем вентиляции и кондиционирования // С.О.К.-2007, № 4-5.