 | |
МЕНЮ
- Главная
- Языкознание филология
- Финансовые науки
- Управленческие науки
- Товароведение
- Технология
- Теплотехника
- Теория организации
- Теория государства и права
- Таможенная система
- Схемотехника
- Строительство
- Страхование
- Статистика
- Религия и мифология
- Психология и педагогика
- Промышленность производство
- Медицинские науки
- Медицина
- Краеведение и этнография
- Компьютерные науки
- История
- Искусство и культура
- Информатика
- Инвестиции
- Издательское дело и полиграфия
- Зоология
- Журналистика
- Естествознание
- Деньги и кредит
- Делопроизводство
- Гражданское право и процесс
- Государство и право
- Геополитика
- Геология
- Геодезия
- География
- Военная кафедра
- Ветеринария
- Валютные отношения
- Бухгалтерский учет и аудит
- Ботаника и сельское хоз-во
- Биржевое дело
- Биология и химия
- Биология
- Безопасность жизнедеятельности
- Банковское дело
- Астрономия
- Астрология
- Архитектура
- Арбитражный процесс
- Административное право
- Авиация и космонавтика
- Карта сайта
Дипломная работа: Проектирование диспетчерского центра котельных установок
WИСХ = Wз*Wк =![]()
![]() =
=
![]() (2.1)
(2.1)
Проверим исходную систему на устойчивость, т. е. получим график переходного процесса (рис. 2.4.1):
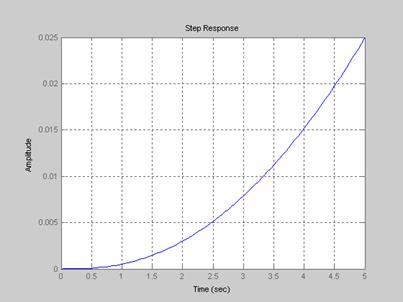
Рис. 2.4.1
Из рисунка видно, что переходный процесс является расходящимся, следовательно исходная система неустойчива и требует регулирования.
Первый контур регулирования

Рис.2.4.2
КТ = 0.08/8 = 0.01 ,(2.2)
Найдем исходную ПФ 1 контура
WИСХ1(p)= Wз*Wк *КТ, (2.3)
WИСХ1(р) = ![]()
![]() 0.01 =
0.01 = ![]() , (2.4)
, (2.4)
Будем настраивать внутренний контур на технический оптимум.
При настройке на технический оптимум желаемая передаточная функция имеет вид
Wж1(р)= (2.5)
(2.5)
С другой стороны WЖ1 (р)= Wрег1(р)* Wисх1(р), следовательно
Wрег1(р)= (2.6)
(2.6)
Wрег1(р)=![]() , (2.7)
, (2.7)
Выполним проверку. Найдем желаемую ПФ замкнутой системы
 (2.8)
(2.8)
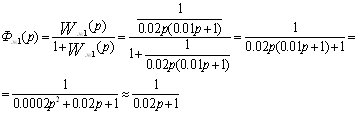
Найдем ПФ замкнутого первого контура
Ф1(S)= =
= ![]() , (2.9)
, (2.9)
Для дальнейших расчетов примем
Ф1(S) ≈![]() , (2.10)
, (2.10)
Расчеты выполнены верно:
Ф1(S) = ФЖ1 (S).
Найдем ПФ замкнутой и разомкнутой системы
Wраз=Ф3*![]()
 , (2.11)
, (2.11)
![]() , (2.12)
, (2.12)
Проверим систему на устойчивость, т. е. получим график переходного процесса (рис.2.4.3):
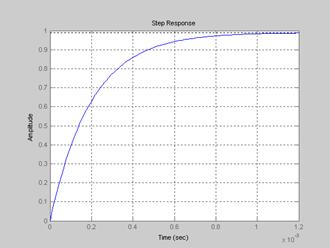
Рис. 2.4.3
Из рисунка видно, что время переходного процесса равно 0.8 сек, следовательно рассчитанный регулятор подходит для данной системы и система является устойчивой.
2.5 Реализация корректирующих устройств на регуляторах
МЕТОДИКА СИНТЕЗА ЦИФРОВОГО РЕГУЛЯТОРА
В связи с тем, что контроллер, используемый в системе управления ТП, работает дискретно, то и регуляторы должны быть представлены в дискретном виде (аппроксимация Тустена или Z - преобразования ).
Существуют различные методы синтеза цифровых регуляторов, основанные на теории Z - преобразования и пространства состояний. Эти методы требуют очень громоздких математических преобразований и используются в особо точных системах управления.
Рассмотрим более простой подход, состоящий в предварительном синтезе непрерывных регуляторов известными методами теории автоматического регулирования для непрерывных систем и последующем переходе к цифровому регулятору, эквивалентному синтезированному аналоговому.
Задача переоборудования аналоговых регуляторов решается как задача аппроксимации передаточной функции данного регулятора дискретной передаточной функцией цифрового регулятора.
В инженерной практике наибольшее применение нашла аппроксимация, полученная на основе билинейного преобразования или аппроксимация Тустена.
Согласно этой аппроксимации
 ;
; ![]() , (2.13)
, (2.13)
где Т - интервал дискретизации по времени
Однако, этим методом можно пользоваться только тогда, когда интервал дискретизации по времени для цифровой системы Т мал по сравнению с самой малой постоянной времени системы управления Тm. Согласно теореме Котельникова - Шеннона непрерывный сигнал достаточно точно восстанавливается по совокупности его дискретных значений, если
Т £ 0,5 Тm.. (2.14)
На практике рекомендуется иметь больший коэффициент запаса
Т £ ( 0,1 - 0,2 ) Тm.(2.15)
Определим период дискретизации (Т): это обратная величина от частоты контроллера, но лучше взять частоту АЦП, которая в нашем случае равна 48КГц=48000Гц. Выбор частоты АЦП связан с тем, что скорость обработки информации в первую очередь зависит от скорости работы АЦП.
![]() , (2.16)
, (2.16)
Проверим соблюдение условия (теорема Котельникова - Шеннона)
Т £ 0,5 Тm.. (2.17)
0.00001 £ 0,5*0.02, (2.18)
0.00001 £ 0.01, (2.19)
Условие соблюдается, следовательно период дискретизации выбран правильно.
Произведем перевод полученных регуляторов в дискретные.
Синтез цифровых регуляторов по средствам программы MatLab
Wрег1(р) =![]() , (2.20)
, (2.20)
Wрег1(z) =![]() , (2.21)
, (2.21)
3. Создание диспетчерского центра
В настоящее время в поселке Варламово в эксплуатации находятся две котельные установки и еще одна готовится к пуску в этом году. Такое количество полностью перекрывает нужду населения и учреждений. В данной дипломной работе мы рассмотрим создание единого диспетчерского центра для котельных установок. Создание такого центра обусловлено техническим заданием руководства УЖКХ, для того чтобы иметь постоянный контроль за процессом работы котельных установок в режиме реального времени. Диспетчерский центр должен находиться в здании УЖКХ п. Варламово.
3.1 Аппаратная часть
В состав аппаратной части входи входят:
а. Компьютер
б. сетевая карта
в. модем
Рассмотрим каждый пункт подробнее.
а. Компьютер
Компьютер для диспетчерского центра должен иметь следующие характеристики:
- процессор;
Должен иметь большие характеристики по производительности, т.к. он должен будет обрабатывать данные поступающие с котельных станций, а также вести архивирование и резервное копирование всех данных и параметров. В данном случае мы остановились на процессоре фирмы Intel Pentium 4 (2.66 ГГц, Socket-755).
- материнская плата;
Должна подходить по параметрам взаимодействия с процессором, а также иметь встроенный сетевой контроллер. В данном случае мы остановились на материнской плате фирмы ASUSTeK P5GD1 PRO
- Оперативная память;
Должна по подходить по параметрам взаимодействия с материнской платой. Объем оперативной памяти должен составлять не менее 1 Гб. В данном случае мы остановились на оперативной памяти фирмы Kingston (DIMM 512 DDR SDRAM PC3200). Приобретаем две панели.
- Жесткий диск;
Должен иметь достаточно большое дисковое пространство для хранения отчетов, архивов и резервных копий. В данном случае мы остановились на жестком диске фирмы Seagate (HDD 120 Гб, SATA).
- Видеокарта
Должна иметь средние характеристики по производительности. В данном случае мы остановились на видеокарте фирмы MicroStar MS-8940 120 Мб.
- Корпус;
Должен иметь блок питания не менее 400 Вт. В данном случае мы остановились на корпусе фирмы Foxconn TPS-538 400W.
- Устройства ввода;
Клавиатура и мышь выбираются любые и не должны соответствовать каким либо специальным параметрам. В данном случае мы остановились на клавиатуре и мышке фирмы Genius.
- Монитор;
Должен иметь диагональ не менее 17 дюймов и высокое качество изображения, т.к. оператор 12 часов проводит за свои рабочим местом. В данном случае мы остановились на мониторе фирмы Samsung SyncMaster 797MB.
- Колонки;
Необходимы для вывода звуковой информации. В данном случае мы остановились на колонках фирмы Genius Mini SP-Q06.
- Привод DVD+/-RW;
Необходим для записи информации для длительного хранения. В данном случае мы остановились на приводе фирмы Nec ND-4550A.
б. Сетевая карта
В нашем случае это сетевая карта фирмы D-Link DFE 550 TX 10/100.
Необходимо приобрести две сетевых карты.
Т.к. наша система будет работать на скорости 100 Мб/с то оборудование выбирается в соотношении характеристики-цена. Данная сетевая карта является одной из наиболее приемлемых моделей.
в. Модем
Для взаимодействия по протоколу MLink нам необходим VDSL-модем, который обеспечивает высокую скорость передачи данных. Необходимо приобрести 3 модема, по модему на каждую станцию.
Таким образом, соединение компьютера с контроллером происходит удаленно по медным проводам через модем. Для устойчивой работы необходимо также создать «выделенный» канал связи. Он создается на АТС.
3.2 Программное обеспечение
Программное обеспечение поставляется вместе с контроллерами DeltaV.
Рассмотрим этот программный продукт подробнее.
Для нашей системы выбираем пакет ПО «Профессиональный плюс»
Каждая система DeltaV имеет одну и только одну рабочую станцию с пакетом программного обеспечения «Профессиональный ПЛЮС». Эта рабочая станция поддерживает глобальную базу данных конфигураций системы, а также обеспечивает конфигурирование системы. Таким образом, пакет ПО «Профессиональный ПЛЮС» является основным интерфейсом системы, предназначенным для решения инженерных и конфигурационных задач. Для небольших систем DeltaV данный пакет может служить также как интерфейс для операторского управления и диагностики. Таблица 3.1 содержит описание станции Профессиональной ПЛЮС.
Таблица 3.1
| Приложения, которые входят в состав пакета | Лицензии, которые можно добавить | Неразрешенные Приложения |
|
AMSinside (Ff) Конфигурационная база данных** Пакет ПО «Студия Конфигурирования» Архиватор данных процесса, 250 параметров Студия управления–Онлайн Диагностика Журнал Событий ** ПО «Просмотр Истории» Интерфейс оператора** Пакет ПО «Студия Рецептур» Автонастройщик |
Интерфейс Оператора рецептур, VE2146 Базовое управление периодическими процессами, VE2234Sxxxx Профессиональное управление периодическими процессами, VE2236Sxxxx Служба удаленного доступа DeltaV для пакета «Профессиональный ПЛЮС», VE2151 |
Архиватор данных рецептур Управляющее ПО «Вычисления» Архиватор данных процесса, >250 параметров Управляющее ПО «Сбор Данных» OPC сервер, >250 значений |
Система DeltaV поддерживает три языка управления, так что всегда можно выбрать наиболее подходящий язык для конкретной задачи. Можно использовать Диаграммы функциональных блоков (ДФБ), Диаграммы функциональных последовательностей (ДФП) и структурированный текст (СТ), что делает разработку стратегии управления интуитивно понятной и простой.
Функциональность лицензии "Сбор данных" включена в базовую функциональность ПО "Профессиональное ПЛЮС".
Пример: Если заказывается лицензия "Профессиональная ПЛЮС" на 1000 ТПУ и "Управление" на 200 ТПУ, то 800 ТПУ можно использовать для контроля (регистрации данных, мониторинга). В модулях, которые выполняют только функции мониторинга, можно использовать перечисленные ниже функциональные блоки. Применение других функциональных блоков в модуле или использование параметров, ссылающихся на модули только для мониторинга, приведет к тому, что все ТПУ этого модуля будут рассматриваться как ТПУ для управления.
Функции расширенного управления, входящие в ПО Нечеткая логика, Автонастройщик и Нейро DeltaV, а также в ПО сторонних производителей для управления с прогнозированием по модели, лицензируются отдельно и не включаются в перечисленные выше категории лицензий (за более подробной информацией обратитесь к техническим проспектам по соответствующим разработкам для расширенного управления).
Предварительные условия для работы:
- Контроллер DeltaV M3, M5 Plus или MD.
- Одна станция Профессиональная Плюс должна входить в систему DeltaV для конфигурирования программного обеспечения.
4. Проектирование системы автоматизированного управления с использованием пакета Rational Rose
На диаграмме вариантов использования видно, что режим работы задается оператором вариантом использования «Управление системой». После запуска оператором процесса контроллер, получая данные от датчиков, управляет устройствами. Контроллер выдает в той или иной форме информацию о текущем состоянии процесса, что показано на диаграмме вариантом использования «Предоставление отчета». Протоколирование работы системы не рассматривается в данном проекте.
4.1 Построение структуры системы
Физическое представление системы управления не может быть полным, если отсутствует информация о том, на какой технологической платформе она реализована. Поэтому после того, как основные функции системы определены, следует определиться с аппаратной частью проектируемой системы. На основании этого построим диаграмму топологии (рис. 4.1.1). Диаграмма топологии является единой для системы в целом, поскольку должна всецело отражать особенности ее реализации.
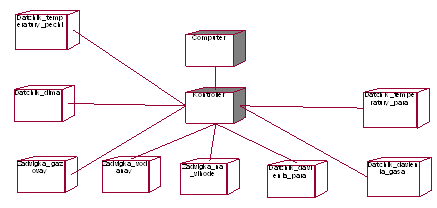
Рис. 4.1.1 Диаграмма топологии
Центральным устройством системы управления, функционально связанным со всеми устройствами системы и управляющий ими, является контроллер, что соответствует определенным выше требованиям к системе.
Далее определяем, каким образом устройства, показанные на диаграмме топологии, взаимодействуют между собой. Для этого сначала разделим устройства в зависимости от выполняемых ими функций на следующие категории (классы):
× Контроллер (класс Controller) – посылает запросы датчикам и управляющих сигналов исполняющим устройствам.
× Задвижки (класс Zadvigka) - открытие и закрытие.
× Датчик давления (класс Datchik_davlenia) – измерение давления.
× Датчик температуры (класс Datchik_temperatury) - измерение температуры.
× Датчик дыма (класс Datchik_dima) - измерение задымленности. После декомпозиции системы (разбиения на классы), представим ее как совокупность взаимодействующих объектов соответствующих классов. На данной диаграмме приняты следующие обозначения:
Datchik_temperatury_pechi – датчик температуры печи;
Datchik_temperatury_para – датчик температуры пара;
Datchik_dima - датчик дыма;
Datchik_davlenia_para – датчик давления пара;
Datchik_davlenia_gasa – датчик давления газа;
Zadvigka_na_vihode – задвижка на выходе;
Zadvigka_vodanay – задвижка на воду;
Zadvigka_gazovay – задвижка на газ;
Легко заметить, почти все объекты, представленные на диаграмме, соответствуют устройствам на диаграмме топологии.
На диаграмме видно, что всем объектам класса Zadvigka контроллером посылаются управляющие сигналы на занятие определенного положения (Pologenie) соответствующей задвижкой. Датчикам Datchik_davlenia, Datchik_temperatury, Datchik_dima контроллер посылает запросы на выдачу соответственно значения температуры, давления и наличия дыма (Schitat_informaciu).
После того, как были определена принадлежность объектов тем или иным классам, детализируем каждый класс с целью определения свойств объектов системы.
Класс Zadvigka
Так как клапаны должны выполнять только функции открытия и закрытия, класс не содержит атрибутов, а содержит только два метода: Pologenie() и Zakrit().
Класс Datchik_temperatury
Класс Datchik_davlenia
Класс Datchik_dima
Класс Controller
Должен содержать в себе все введенные оператором параметры технологического процесса:
Schitat_informaciu – считывание информации с датчиков.
Stop – остановка работы системы.
Izmenit_parametr – изменение параметров работы системы .
Класс Computer
Prinat_informaciu – принимает информацию с датчиков и контроллера.
Stop – сигнал на остановку системы.
Izmenit_parametr – сигнал на изменение параметров.
Все выше сказанное представлено на диаграмме классов рис. 4.1.3
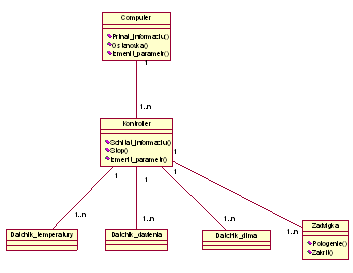
Рис. 4.1.3 Диаграмма классов системы
4.2 Построение алгоритма работы системы
Запуск системы управления котельной установкой производится по команде оператора после того, как им были введены параметры протекания процесса. Перед запуском предполагается, что все параметры норме. После запуска система начинает работать в автоматическом режиме, пока не будет остановлена оператором. При этом система должна автоматически обеспечивать предупреждение аварийных ситуаций. При необходимости изменить параметры оператор должен сначала остановить работу системы и затем изменить параметры.
Система функционирует следующим образом.
Предполагается, что все внешние параметры протекания процесса находятся в норме, тогда происходит пуск системы.
Если система во время работы обнаруживает, что какой-либо параметр выходит за установленные рамки, подается сигнализация и происходит остановка системы.
Во время работы происходит постоянная обработка входящих величин с датчиков, что говорит о том – система находится во взведенном состоянии. Дублирование данных и внешний отчет способствует анализу протекания процесса.
Алгоритм обработки данных имеет вид, представленный на рис. 4.2.1
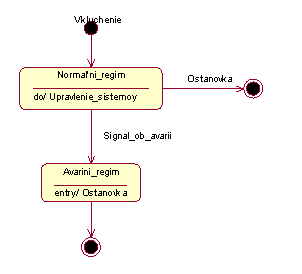
Рис. 4.2.1 Диаграмма активности, иллюстрирующая обработку данных
4.3 Генерация программного кода
Класс в Rational Rose — это описание общей структуры (данных и связей) для дальнейшего создания объектов. Для того чтобы генератор Rational Rose имел возможность создавать на основе описанной модели программный код, для каждого класса необходимо указать язык, для которого будет создаваться код. Также необходимо определить компонент, в котором этот класс будет храниться. Если в качестве языка для создания кода указан VC++, то пользователь получает доступ ко всей иерархии классов библиотеки MFC при помощи визуальных средств Model Assistant. Поэтому прежде чем приступить к генерации кода на Visual C++, следует создать диаграмму компонентов, отражающая организацию и взаимосвязи программных компонентов, представленных в исходном коде, двоичных или выполняемых файлах. Связи в данном типе диаграммы представляют зависимости одного компонента от другого и имеют специальное отображение через значок «зависимости».
В данном проекте будет построена упрощенная диаграмма компонентов, на которой каждый из компонентов будет представлять класс или его реализацию, хотя при разработке программного кода в большинстве случаев могут использоваться другие подходы.
Для каждого из классов создается два файла: заголовочный (с расширением .h), который содержит описание класса, и файл реализации (с расширением .cpp), где содержится программная реализация методов класса.
Поэтому каждый класс на диаграмме компонентов будет представлен двумя компонентами: Package Specification и Package Body. Первый компонент представляет собой определение пакета (заголовочный файл с расширением .h), второй – тело пакета (файл с расширением.cpp).
Компоненты на диаграмме (рис. 4.3.1) для простоты имеют те же названия, что и класс, который они представляют.

ИНТЕРЕСНОЕ
© 2009 Все права защищены. |